标签:学习 disable sam 比较 interrupt alt 实例 png lan
[导读] 前文分析了Linux设备驱动的驱动模型,本文来聊聊Platform_driver/Platform_device这个类。做嵌入式Linux的驱动,这个也是绕不开的,所以来学习分析总结一下。
上文阅读:
注:代码分析基于linux-5.4.31
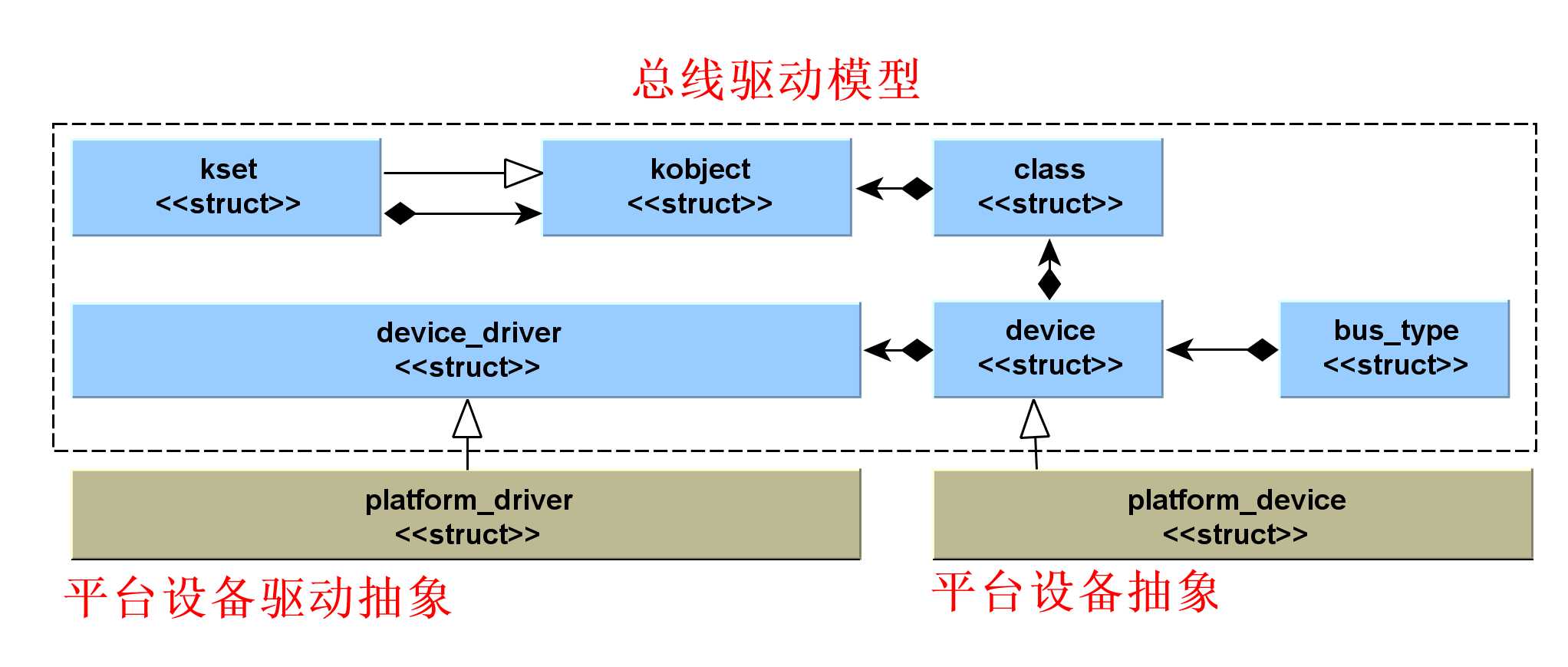
前文谈到的总线驱动模型(注这个图是照着bootlin的文档绘制的):
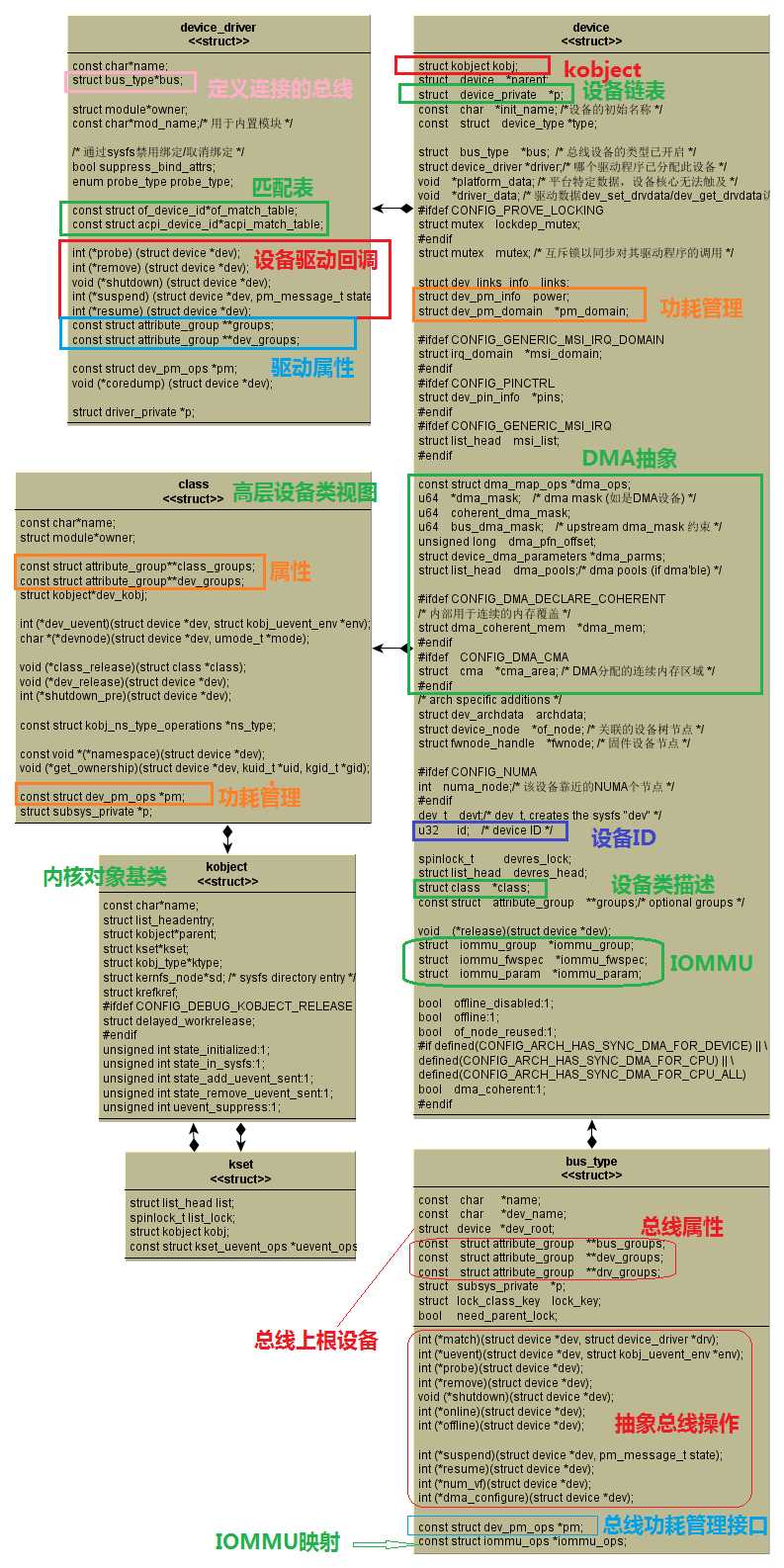
同时,根据代码分析其基础数据结构框架关系如下(UML关系并不严谨,仅为理解方便):
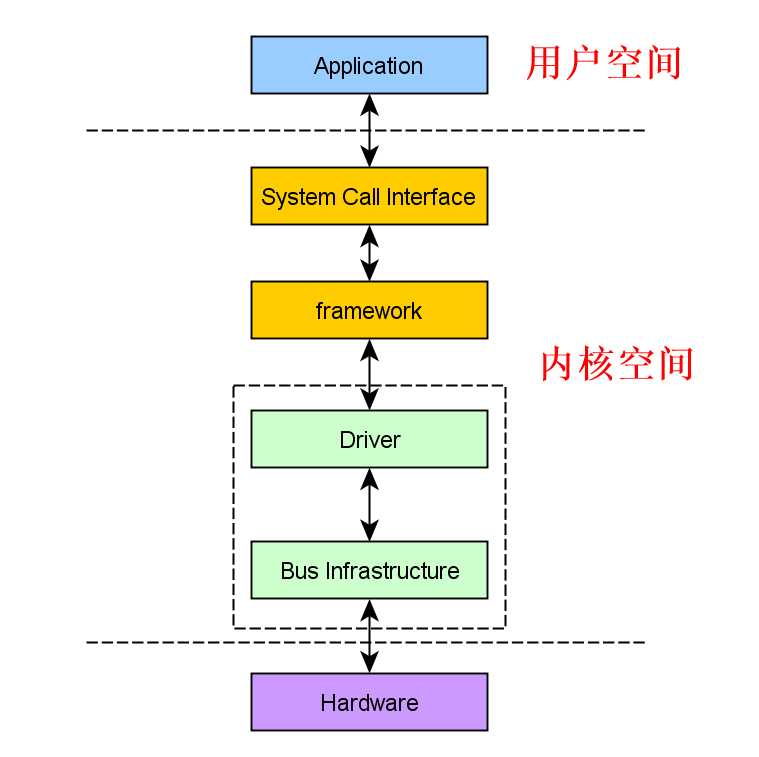
可见驱动程序的模型分层有一层总线基础层,那么对于嵌入式开发领域而言,有很多SOC芯片内置了各种外设,并比如LCD,UART、audio、摄像头口等等,并没有总线。为了统一驱动架构抽象,所以引入了platform bus这个虚拟的总线模型。做过嵌入式开发的人应该都有体会,这类设备在嵌入式系统中非常多,所以在研究具体某类设备的驱动开发之前,有必要研究platform 设备的驱动模型。在强调一下这个是统一在总线驱动模型这个体系内的。
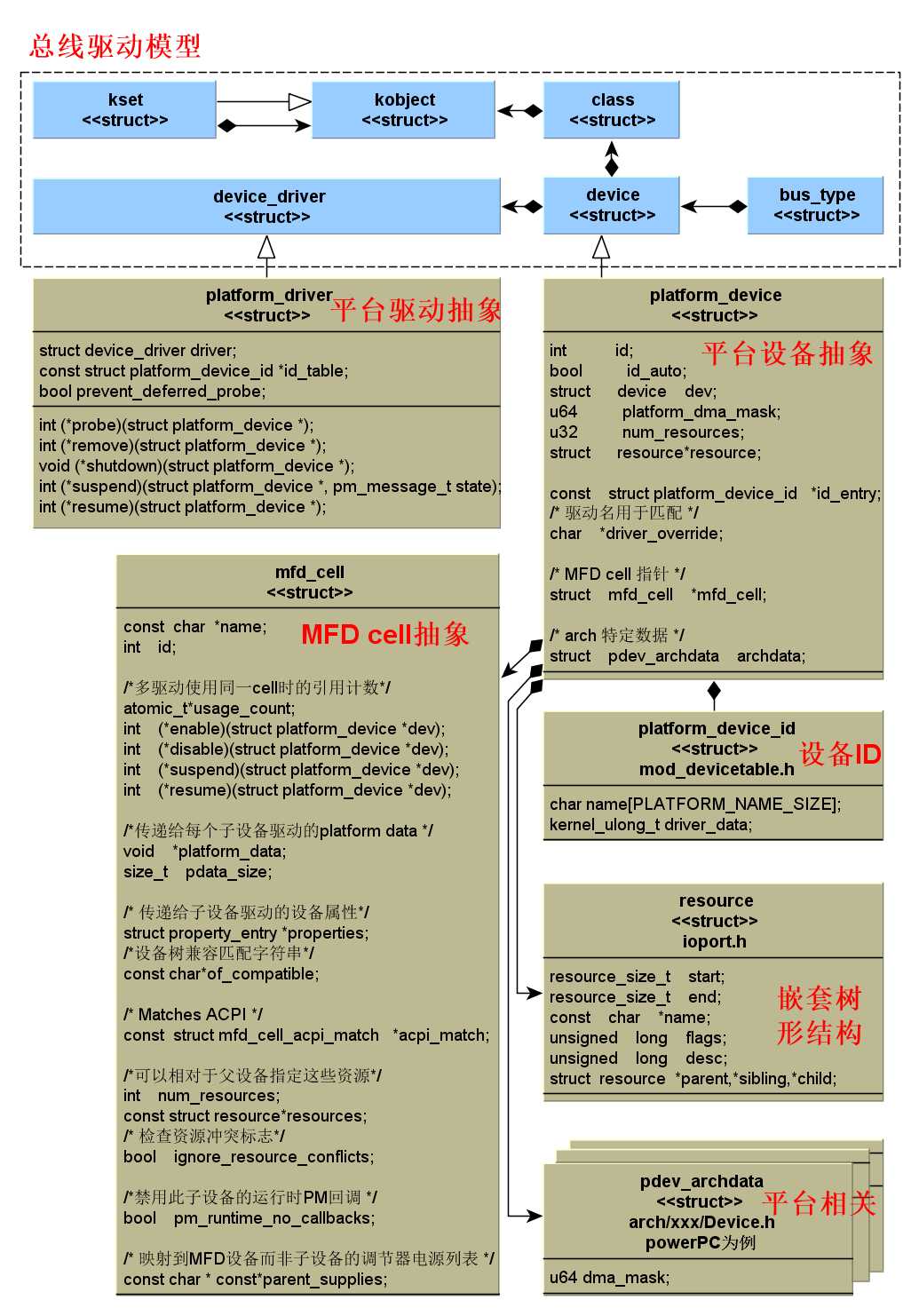
定义在./include/linux/platform_device.h中,来梳理一下这些数据结构间的关系:
struct device platform_bus = {
.init_name = "platform",
};
EXPORT_SYMBOL_GPL(platform_bus);
EXPORT_SYMBOL_GPL(__platform_driver_register);
EXPORT_SYMBOL_GPL(__platform_driver_probe);
EXPORT_SYMBOL_GPL(platform_get_resource_byname);
EXPORT_SYMBOL_GPL(platform_get_irq_byname);
....
那么既然这条总线并不存在,往往并不能实现设备枚举、热插拔等功能。
既然不能利用总线自动枚举,那么底层又是怎么玩的呢?实际上可选的有这样几种方式
平台设备是通常在系统中显示为自治实体的设备。 这包括基于旧端口的设备和到外围总线的主机桥接,以及集成到片上系统平台中的大多数控制器。 它们通常的共同点是从CPU总线直接寻址。 很少有platform_device通过某种其他类型的总线的一部分连接的。 但其寄存器仍将直接可寻址。
int platform_driver_register(struct platform_driver *drv);
uart0: serial@44e09000 {
compatible = "ti,omap3-uart";
ti,hwmods = "uart1";
clock-frequency = <48000000>;
reg = <0x44e09000 0x2000>;
interrupts = <72>;
status = "disabled";
};
以samsung.c 串口驱动程序为例:
/*兼容匹配表*/
static const struct platform_device_id s3c24xx_serial_driver_ids[] = {
{
.name = "s3c2410-uart",
.driver_data = S3C2410_SERIAL_DRV_DATA,
}, {
.name = "s3c2412-uart",
.driver_data = S3C2412_SERIAL_DRV_DATA,
}, {
.name = "s3c2440-uart",
.driver_data = S3C2440_SERIAL_DRV_DATA,
}, {
.name = "s3c6400-uart",
.driver_data = S3C6400_SERIAL_DRV_DATA,
}, {
.name = "s5pv210-uart",
.driver_data = S5PV210_SERIAL_DRV_DATA,
}, {
.name = "exynos4210-uart",
.driver_data = EXYNOS4210_SERIAL_DRV_DATA,
}, {
.name = "exynos5433-uart",
.driver_data = EXYNOS5433_SERIAL_DRV_DATA,
},
{ },
};
MODULE_DEVICE_TABLE(platform, s3c24xx_serial_driver_ids);
#ifdef CONFIG_OF
/*设备树对应解析匹配表*/
static const struct of_device_id s3c24xx_uart_dt_match[] = {
{ .compatible = "samsung,s3c2410-uart",
.data = (void *)S3C2410_SERIAL_DRV_DATA },
{ .compatible = "samsung,s3c2412-uart",
.data = (void *)S3C2412_SERIAL_DRV_DATA },
{ .compatible = "samsung,s3c2440-uart",
.data = (void *)S3C2440_SERIAL_DRV_DATA },
{ .compatible = "samsung,s3c6400-uart",
.data = (void *)S3C6400_SERIAL_DRV_DATA },
{ .compatible = "samsung,s5pv210-uart",
.data = (void *)S5PV210_SERIAL_DRV_DATA },
{ .compatible = "samsung,exynos4210-uart",
.data = (void *)EXYNOS4210_SERIAL_DRV_DATA },
{ .compatible = "samsung,exynos5433-uart",
.data = (void *)EXYNOS5433_SERIAL_DRV_DATA },
{},
};
MODULE_DEVICE_TABLE(of, s3c24xx_uart_dt_match);
#endif
/*串口设备驱动实体*/
static struct platform_driver samsung_serial_driver = {
.probe = s3c24xx_serial_probe,
.remove = s3c24xx_serial_remove,
.id_table = s3c24xx_serial_driver_ids,
.driver = {
.name = "samsung-uart",
.pm = SERIAL_SAMSUNG_PM_OPS,
.of_match_table = of_match_ptr(s3c24xx_uart_dt_match),
},
};
对于做嵌入式Linux驱动开发,个人体会是先对总线驱动模型有一个相对清晰的概念认识会比较好,而平台设备以及平台设备驱动模型同样是衍生于总线驱动模型,这样从体系结构上就变得相对统一了。平台设备及驱动在嵌入式系统里大量应用,很多SOC内置了大量丰富的各类设备接口,这些接口往往都是通过处理器内部总线进行直接寻址的,这类型的设备几乎都是通过平台设备及驱动模型进行抽象实施的,所以深入理解平台设备/平台设备驱动模型,无疑对开发此类设备驱动程序大有助益。
文章出自微信公众号:嵌入式客栈,由于时间关系,博客可能无法及时更新,最新内容,请关注本人公众号,严禁商业使用,违法必究

标签:学习 disable sam 比较 interrupt alt 实例 png lan
原文地址:https://www.cnblogs.com/embInn/p/13034307.html