标签:一个 set rtp 动态 范围 空白 超过 搜索 索引
RRT算法主体
%% 此代码有一种情况会死循环
% 起始点周围全是障碍物时会出现死循环的情况,应该加一些代码进行判断,是这种请款直接跳出循环(算法处的while)
% 基于栅格地图的机器人路径规划算法
% 第4节:RRT算法
clc
clear
close all
%% 障碍物、空白区域、起始点、目标点定义
% 行数和列数
rows = 30;
cols = 50;
[field,cmap] = defColorMap(rows, cols);
% 起点、终点、障碍物区域
startPos = 2;
goalPos = rows*cols-2;
field(startPos) = 4;
field(goalPos) = 5;
%% 算法
% 定义树节点,第一列放节点编号,第二列放该节点的父节点
treeNodes = [startPos, 0];
while true
% 初始化parentNode和childNode
parentNode = [];
childNode = [];
% 在地图空间随机采样撒点
samplePoint = getSamplePoint(field, treeNodes);
% 依次遍历每一个树节点到采样点的距离,取最小值对应的树节点
for i = 1:size(treeNodes,1)
[row_treeNode, col_treeNode] = ind2sub([rows, cols], treeNodes(i,1));
[row_samplePoint, col_samplePoint] = ind2sub([rows, cols], samplePoint);
dist(i) = norm([row_treeNode, col_treeNode] - [row_samplePoint, col_samplePoint]);
end
[~,idx] = min(dist);
parentNode = treeNodes(idx,1);
% 生成新的子节点,行列坐标
childNode = getChildNode(field, parentNode, samplePoint);
% 判断该子节点是否超过地图限制
if childNode(1) < 1 || childNode(1) > rows ||...
childNode(2) < 1 || childNode(2) > cols
continue
else
% 转为线性索引
childNode = sub2ind([rows, cols], childNode(1), childNode(2));
end
% 判断父节点与子节点的连线是否跨过障碍物
flag = judgeObs(field, parentNode, childNode);
if flag
continue
end
% 判断该子节点是否已经存在于treeNodes,未在则追加到treeNodes
% 在的话跳出此次循环,重新撒点找到合适的子节点再进行判断
if ismember(childNode, treeNodes(:,1))
continue
else
treeNodes(end+1,:) = [childNode, parentNode];
end
% 判断子节点是否位于目标区域,此代码部分用于跳出整个循环
[row_childNode, col_childNode] = ind2sub([rows, cols], childNode);
[row_goalPos, col_goalPos] = ind2sub([rows, cols], goalPos);
if abs(row_childNode - row_goalPos) + ...
abs(col_childNode - col_goalPos) < 2
break
end
end
%% 找出目标最优路径
% 最优路径
path_opt = [];
idx = size(treeNodes,1);
while true
path_opt(end+1) = treeNodes(idx,1);
parentNode = treeNodes(idx,2);
if parentNode == startPos
break;
else
idx = find(treeNodes(:,1) == parentNode);
end
end
% 路径信息反映到field中
field(treeNodes(:,1)) = 3;
field(path_opt) = 6;
field(startPos) = 4;
field(goalPos) = 5;
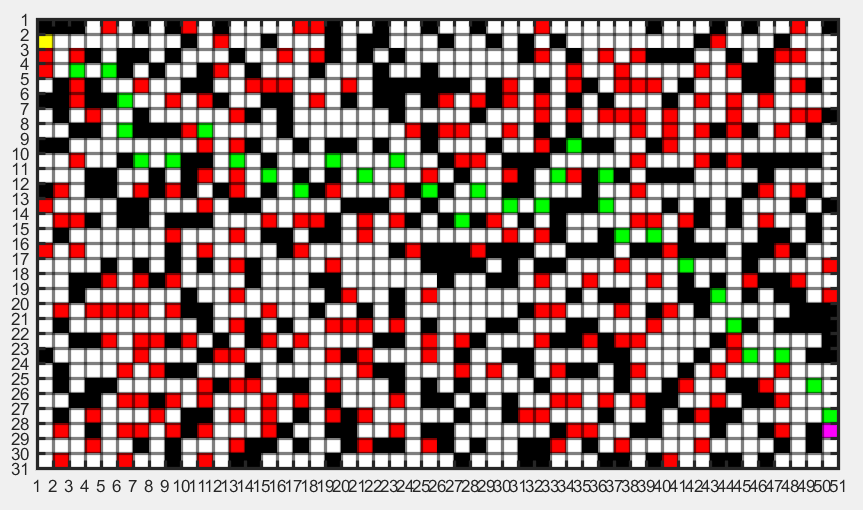
%% 画栅格图
image(1.5,1.5,field);
grid on;
set(gca,‘gridline‘,‘-‘,‘gridcolor‘,‘k‘,‘linewidth‘,2,‘GridAlpha‘,0.5);
set(gca,‘xtick‘,1:cols+1,‘ytick‘,1:rows+1);
axis image;
defColorMap()函数代码
function [field,cmap] = defColorMap(rows, cols)
cmap = [1 1 1; ... % 1-白色-空地
0 0 0; ... % 2-黑色-静态障碍
1 0 0; ... % 3-红色-已经搜索过的点
1 1 0;... % 4-黄色-起始点
1 0 1;... % 5-品红-目标点
0 1 0; ... % 6-绿色-到目标点的规划路径
0 1 1]; % 7-青色-动态规划的路径
% 构建颜色MAP图
colormap(cmap);
% 定义栅格地图全域,并初始化空白区域
field = ones(rows, cols);
% 障碍物区域
obsRate = 0.3;
obsNum = floor(rows*cols*obsRate);
obsIndex = randi([1,rows*cols],obsNum,1);
field(obsIndex) = 2;
getSamplePoint()函数代码
function samplePoint = getSamplePoint(field, treeNodes) [rows, cols] = size(field); %field(treeNodes(:,1)) = 3; %这句话多余,因为matlab是值传递不是引用 while true samplePoint = randi([1,rows*cols]); if field(samplePoint) == 1 break; end end
getChildNode()函数代码
function childNode = getChildNode(field, parentNode, samplePoint)
% 定义生长单步长为2个栅格,选取父节点周边16个节点作为备选子节点
% 根据随机采样点与父节点的角度,确定生长的子节点
[rows, cols] = size(field);
[row_samplePoint, col_samplePoint] = ind2sub([rows, cols], samplePoint);
[row_parentNode, col_parentNode] = ind2sub([rows, cols], parentNode);
% 定义16个点的行列坐标
% 注意,为了行列坐标与x/y坐标匹配,从父节点的下节点逆时针开始定义,依次编号
childNode_set = [ row_parentNode+2, col_parentNode;
row_parentNode+2, col_parentNode+1;
row_parentNode+2, col_parentNode+2;
row_parentNode+1, col_parentNode+2;
row_parentNode, col_parentNode+2;
row_parentNode-1, col_parentNode+2;
row_parentNode-2, col_parentNode+2;
row_parentNode-2, col_parentNode+1;
row_parentNode-2, col_parentNode;
row_parentNode-2, col_parentNode-1;
row_parentNode-2, col_parentNode-2;
row_parentNode-1, col_parentNode-2;
row_parentNode, col_parentNode-2;
row_parentNode+1, col_parentNode-2;
row_parentNode+2, col_parentNode-2;
row_parentNode+2, col_parentNode-1];
% 计算16个子节点的角度范围集,和当前随机点的角度范围
theta_set = linspace(0,2*pi,16);
theta = atan2((col_samplePoint - col_parentNode), ...
(row_samplePoint - row_parentNode));
% 若theta位于第三四象限,加上2*pi
if theta < 0
theta = theta + 2*pi;
end
% 遍历周围的16个点,判断角度位于哪一个范围
for i = 1:15
if theta >= theta_set(i) && theta < theta_set(i+1)
childNodeIdx = i;
break
end
end
% 选中的子节点
childNode = childNode_set(childNodeIdx,:);
judgeObs()函数代码
function flag = judgeObs(field, parentNode, childNode) flag = 0; [rows, cols] = size(field); % 判断子节点是否在障碍物上 obsIdx = find(field == 2); if ismember(childNode, obsIdx) flag = 1; return end % 判断父节点与子节点的连线是否跨过障碍物 [parentNode(1), parentNode(2)] = ind2sub([rows, cols], parentNode); [childNode(1), childNode(2)] = ind2sub([rows, cols], childNode); % 找到蓝色虚线框 P2 = parentNode; P1 = childNode; row_min = min([P1(1), P2(1)]); row_max = max([P1(1), P2(1)]); col_min = min([P1(2), P2(2)]); col_max = max([P1(2), P2(2)]); % 找寻蓝色虚线框内的障碍物点,并判断障碍物是否在父节点与子节点连线上 % 如果是的话退出,重新撒点得到新的子节点再重新判断 % 直到有符合的子节点再继续向下进行 for row = row_min:row_max for col = col_min:col_max if field(row, col) == 2 P = [row, col]; % 直接计算障碍物节点距P1和P2构成的连线的距离 d = abs(det([P2-P1;P-P1]))/norm(P2-P1); if d < 0.5 flag = 1; return end end end end
图像显示:
标签:一个 set rtp 动态 范围 空白 超过 搜索 索引
原文地址:https://www.cnblogs.com/zhjblogs/p/14818321.html