标签:公众号 memset 采样 str 工作 选择 布局 会同 mamicode
前面有两篇文章谈到了模板匹配算法,分别是【工程应用一】 多目标多角度的快速模板匹配算法(基于NCC,效果无限接近Halcon中........) 以及【工程应用二】 多目标多角度的快速模板匹配算法(基于边缘梯度),那么经过最近2个多月的进一步研究,也有了更多的一些心得和体会,这里也简单分享一些在这个过程中属于我个人的理解的一些东西。
1、在上一篇基于边缘梯度的文章中,我曾说使用Canny算子不合适,会丢失一些弱边缘的信息,但是后续我感觉还是可以的。
2、在使用Canny后,一个很好的好处就是可以不做全图的计算了,这对速度的提高还是有很大的贡献的,通常Canny检测到的边缘占全图的像素数不会超出1/10,。
扩展一下: 如果不做 Canny,而是对全图进行边缘检测后,按照边缘点的强度进行排序,然后取强度的前1/10作为候选点,也不失为一种解决问题的方法,但是测试发现偶尔会有丢失或误选目标的现象。
3、对于旋转后的边缘问题,这个可以通过如下的方式进行解决。
旋转后的无效的像素处,按照水平或者垂直方向的信息,对无效的区域的像素用离其水平或垂直方向最近的有效像素填充。选择水平方向实现最为简单和高效。
一个简单的代码如下所示:
int IM_CorrectRotatedImage_Hori(HBitmap Src, HBitmap Mask) { StartEnd *Hori = (StartEnd *)malloc(Mask.Height * sizeof(StartEnd)); if (Hori == NULL) return IM_STATUS_NULLREFRENCE; IM_SimpleMaskRLE_Hori(Mask, Hori); // 获取缩小后的水平行程 for (int Y = 0; Y < Src.Height; Y++) { if (Hori[Y].Start != -1) { memset(Src.Data + Y * Src.Stride, Src.Data[Y * Src.Stride + Hori[Y].Start], Hori[Y].Start); memset(Src.Data + Y * Src.Stride + Hori[Y].End + 1, Src.Data[Y * Src.Stride + Hori[Y].End], Src.Width - Hori[Y].End - 1); } } int Top = -1, Bottom = -1; for (int Y = 0; Y < Src.Height; Y++) { if (Hori[Y].Start != -1) { Top = Y - 1; break; } } for (int Y = Src.Height - 1; Y >= 0; Y--) { if (Hori[Y].Start != -1) { Bottom = Y + 1; break; } } if (Top != -1) { for (int Y = 0; Y <= Top; Y++) { memcpy(Src.Data + Y * Src.Stride, Src.Data + (Top + 1) * Src.Stride, Src.Stride); } } if (Bottom != -1) { for (int Y = Src.Height - 1; Y >= Bottom; Y--) { memcpy(Src.Data + Y * Src.Stride, Src.Data + (Bottom - 1) * Src.Stride, Src.Stride); } } free(Hori); return IM_STATUS_OK; }
此时,再对此图做Canny边缘检测,则无效处因为填充的基本为同一像素或者近似,无效处的Canny值基本为0,在旋转的边缘处因为也是近似,值也约为0,即使不为0,也没有关系,旋转后的蒙版图也会把这些位置给裁剪掉,因此,不会产生新的边缘问题。如下所示:
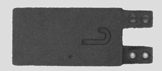

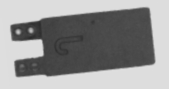
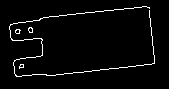





模板图 旋转一定角度的模板图 水平方向边缘填充 Canny边缘检测 旋转后对应的蒙版图 根据蒙版裁切后的边缘图
对于第一个模板,因为其边缘你基本为纯色,因此扩展后的图没有什么问题,而第二个图,扩展后的图进行检测,会看到在无效区域有一些额外的边缘出现,但是经过蒙版裁剪这些区域就消失了。
4、对于得分公式,用  是完全可以的,注意的事情就是,对于模板图像 ,因为提取的候选点是用Canny选出来的,估计GX和GY一般也不会为0,至少不会同是为0,因此整个式子分母中的前半部分不会为0, 那么在编程时如果遇到在原图中的GX和Gy同时为0时,需要注意做特别处理,防止发生除以0的错误,即此位置的贡献为0(分子必然为0)。
是完全可以的,注意的事情就是,对于模板图像 ,因为提取的候选点是用Canny选出来的,估计GX和GY一般也不会为0,至少不会同是为0,因此整个式子分母中的前半部分不会为0, 那么在编程时如果遇到在原图中的GX和Gy同时为0时,需要注意做特别处理,防止发生除以0的错误,即此位置的贡献为0(分子必然为0)。
扩展: 整个表达式是一个归一化的式子,因为模板进行了Canny筛选,但是原图对应的位置是动态的,如果在原图中遇到那种比较光滑的地方(梯度值很小),比如GxS = 1, GyS = 2,这样的值,无论模板对应处的梯度如何,得分都会比较高,比如GxT = 230, GyT = 100,则此时此点的匹配度为: 1*230+2*100 /(sqrt(1*1+2*2)*sqrt(230*230+100*100)) =0.76, 很明显,我们觉得这样的情况是不可以接受的,因此,个人觉得对于这样的点,应该在计算分值时予以剔除(不急于得分加成中)。
5、为了减少Canny检测的噪音,可在检测前进行适当的模糊,高斯模糊、均值模糊、保边模糊随你选,但是半径不易过大,而且要注意随着金字塔的下采样,因为下采样本身就是一种平均,因此模糊的半径应该怎么样来着??????
6、CodeProject上印度小哥的得分贪心算法可以应用上,这个对于金字塔顶层的速度提高有较为明显的作用,但是对于后续的向上扩展搜索加速作用有限,这个主要是因为后续的候选点得分本身就比较高了,那个贪心的要求标准也越来越难以达到。
7、算法的速度优化上有很多方法,1个是原理上的,一个是编码上的。
(1)原理上的,前面说的金字塔时根本,Canny检测减少候选点是主攻,贪心算法是甜点。另外就是在各层的新的候选点的筛选上,也应该逐层减少,操作的原则可以是: 两个候选点的坐标位置过进,取得分大的。 候选点之间的区域重叠度过大, 可以只取得分高者等等。
(2)编码上则八仙过海,各显神通了,我最擅长的是SIMD指令优化。这里提几个小的Trick。
a、梯度值的保存。 上述边缘的梯度值Gx和Gy根据数据的范围,很明显最合适使用的数据类型是signed short。
b、在SIMD指令中有一个_mm_madd_epi16,其函数原型为:
extern __m128i _mm_madd_epi16(__m128i _A, __m128i _B);
我在我博客里多次提前这个函数,他可以一次性型实现8个short类型数据的乘法和4次int类型的加法,如下所示:

如果我们布局的时候,把梯度的X和Y方向数据连续布置,那么得分公式的分子和分母的四个部分乘法和加法(下面的平方也是乘法)就可以直接利用这样的指令实现了,具体的自己好好理解吧。
c、求根号是个比较慢的计算过程,SIMD指令有_mm_sqrt_ps指令一次性实现4个浮点数的开方,那么按照上面的式子就还需要求倒数,我们首先把得分式子的分母中的两个根号里的数据相乘,然后在开方,结果是一样的,很明显就少了一次开方操作, 同时,注意到SIMD里还有一个指令,即_mm_rsqrt_ps,他可以一次性的完成开方和求倒数工作,因此速度就更快了。
d、另外还有一个点,我们在向金字塔底层搜索的过程中,一般的搜索半径为2,即搜索区域为5*5大小,对于这个尺寸,还可以一次性处理4个点,这样就组成 6*4+1个组合,这种组合比直接计算单独的25个点要速度快很多,因为他避免了对模板数据的多次重复读取和计算。
8、除了速度,还有算法稳定性问题,这个也是个比较难的问题,我目前也还遇到一些情况,比如不同的起点角度,都是慢360度的搜索方位,返回的角度值可能有轻微的波动,还比如有些情况可能会丢失一些目标或找到了多余的目标等等。这个还需要后续继续研究,比较增加过程中的亚像素参与等。
9、比较了下halcon的create_shape_model和find_shape_model,发现他的模型文件都特别特别的小,只有几十KB,而且create_shape_model的过程基本是几豪秒杀,因此,感觉他的结构应该更为敲门,也许是用到了亚像素方面的特性,需要慢慢看有么有机遇找到这方面的资料了。
10、halcon有基于形状的多目标、多角度、多缩放尺度的模板检测,这个现在也在想,如何减少计算量,有点麻烦。
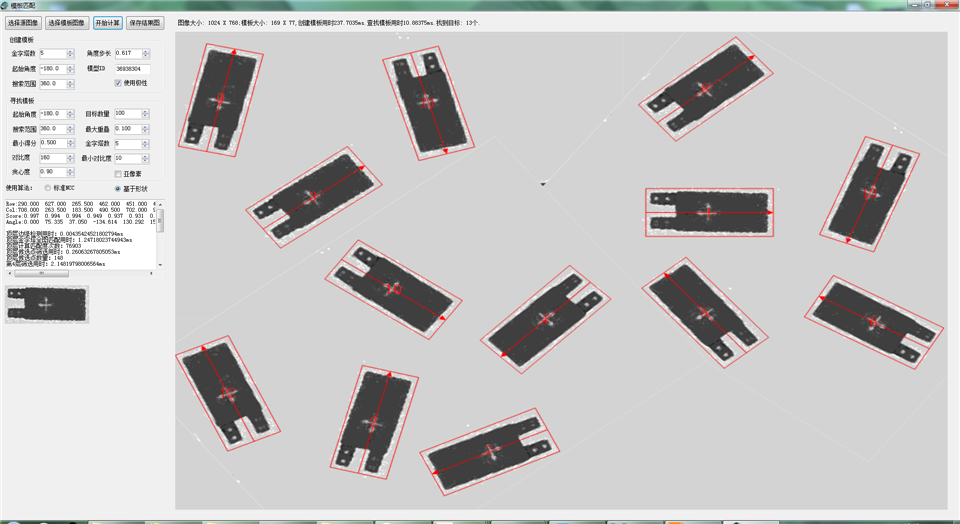
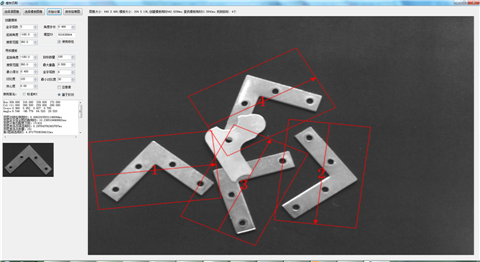
目前,经过一番骚操作,基于形状的匹配在速度上有的时候居然比基于NCC的还快了不少,而且结果上也比较稳定。
如果哪位在工程实践中有需要类似的功能,我可以提供函数接口和Demo(基于边缘的算法),不过唯一的要求就是提供一些实际的素材供我测试算法用。
这里提供一个例子供大家测试: https://files.cnblogs.com/files/Imageshop/TemplateMatching.rar
如果想时刻关注本人的最新文章,也可关注公众号: 
【工程应用四】 基于形状的多目标多角度的高速模板匹配算法进一步研究。
标签:公众号 memset 采样 str 工作 选择 布局 会同 mamicode
原文地址:https://www.cnblogs.com/Imageshop/p/14821562.html