首页
Web开发
Windows程序
编程语言
数据库
移动开发
系统相关
微信
其他好文
会员
首页
>
其他好文
> 详细
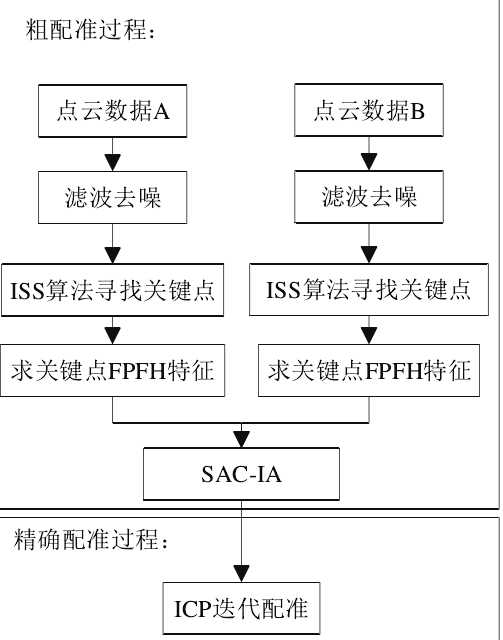
FPFH+ICP点云配准
时间:
2016-05-13 10:15:06
阅读:
2057
评论:
0
收藏:
0
[点我收藏+]
标签:
A,
UniformSampling降噪
B, ISS计算关键点, FPFH特征
在FeatureCloud::
setInputCloud中读入点云,并调用
processInput进行处理:
processInput处理包括:
1, computeSurfaceNormals ()
使用
NormalEstimation计算得到表面法向量
2, computeLocalFeatures ()
FPFHEstimation
KdTree
ISSKeypoint3D
getKeypointsIndicesinRadius
C, SAC-IA配准
findBestAlignment中进行SAC-IA配准计算
D, ICP进一步配准
IterativeClosestPoint
//==打印输出调试信息==//
FILE* fxp = fopen("F:\\x_p.txt","w+");
fprintf(fxp,"%.2f ",df);
fclose(fxp);
来自为知笔记(Wiz)
FPFH+ICP点云配准
标签:
原文地址:http://www.cnblogs.com/skyhuangdan/p/5486134.html
踩
(
0
)
赞
(
0
)
举报
评论
一句话评论(
0
)
登录后才能评论!
分享档案
更多>
2021年07月29日 (22)
2021年07月28日 (40)
2021年07月27日 (32)
2021年07月26日 (79)
2021年07月23日 (29)
2021年07月22日 (30)
2021年07月21日 (42)
2021年07月20日 (16)
2021年07月19日 (90)
2021年07月16日 (35)
周排行
更多
分布式事务
2021-07-29
OpenStack云平台命令行登录账户
2021-07-29
getLastRowNum()与getLastCellNum()/getPhysicalNumberOfRows()与getPhysicalNumberOfCells()
2021-07-29
【K8s概念】CSI 卷克隆
2021-07-29
vue3.0使用ant-design-vue进行按需加载原来这么简单
2021-07-29
stack栈
2021-07-29
抽奖动画 - 大转盘抽奖
2021-07-29
PPT写作技巧
2021-07-29
003-核心技术-IO模型-NIO-基于NIO群聊示例
2021-07-29
Bootstrap组件2
2021-07-29
友情链接
兰亭集智
国之画
百度统计
站长统计
阿里云
chrome插件
新版天听网
关于我们
-
联系我们
-
留言反馈
© 2014
mamicode.com
版权所有 联系我们:gaon5@hotmail.com
迷上了代码!