标签:
设计的RTL结构
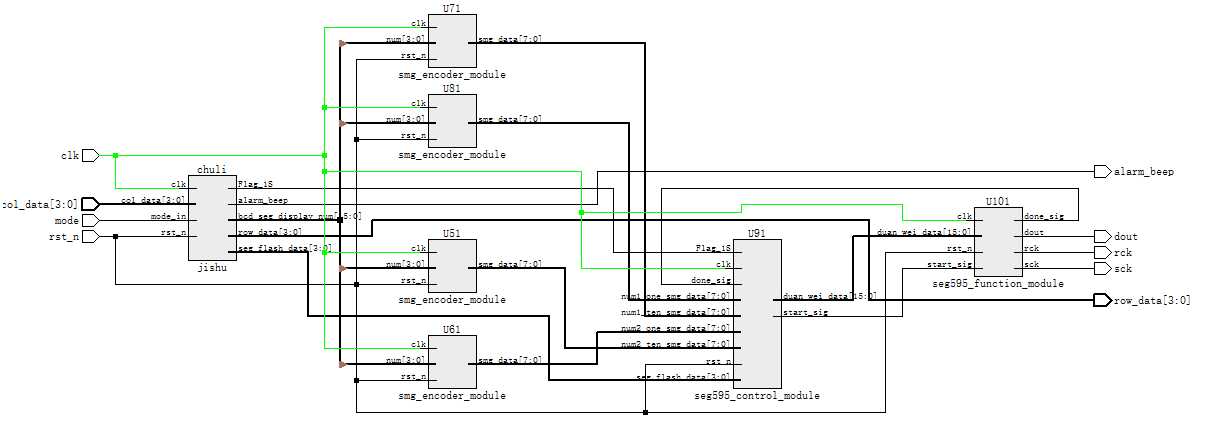
处理模块实现模式切换与计数,4位数码管解码后 595control模块控制数码管的点闪动以及调时位的半秒闪动,595function模块16位串行输出给595驱动数码管显示
module jishu
(
input clk,
input rst_n,
output [3:0] row_data,
input [3:0] col_data,
output alarm_beep,
output[3:0]seg_flash_data,
output Flag_1S,
output [15:0]bcd_seg_display_num,
input mode_in
);
wire [3:0]key_value;
juzhen key_input
(
.clk(clk),
.rst_n(rst_n),
.col_data(col_data),
.row_data(row_data),
.key_value(key_value),
.key_flag_r0(key_flag1),
.key_flag(key_flag)
);
parameter T_half_S=12500000;
parameter T_1S=25000000;
reg [24:0]count1;
reg Flag_1S_r;
always@(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin count1<=0; Flag_1S_r <= 0; end
else if( count1 == T_half_S)
begin
count1 <= count1 + 1‘b1;
Flag_1S_r <=~ Flag_1S_r;
end
else if( count1 == T_1S)
begin
count1<=0;
Flag_1S_r <=~ Flag_1S_r;
end
else
count1 <= count1 + 1‘b1;
end
assign Flag_1S = Flag_1S_r;
wire key_in;
debounce xiaodou
(
.clk(clk),
.rst_n(rst_n),
.key_n(mode_in),
.key_pulse (key_in)
);
reg [3:0]bcd_sec_one_cnt;
reg [3:0]bcd_min_one_cnt;
reg [3:0]bcd_hour_one_cnt;
reg [3:0]bcd_sec_ten_cnt;
reg [3:0]bcd_min_ten_cnt;
reg [3:0]bcd_hour_ten_cnt;
reg[3:0] seg_flash_data_r;
wire [15:0] bcd_seg_display_num;
reg[2:0] mode;
reg [15:0] bcd_seg_display_num_r;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n) begin mode<=0;end
else
begin if(key_in==1) if(mode == 3‘b110) mode <= 3‘b000;
else mode <= mode + 1‘b1;
end
end
always @(posedge clk or negedge rst_n)
if(!rst_n) begin bcd_sec_one_cnt<=0;bcd_sec_ten_cnt<=0;bcd_min_one_cnt<=0;bcd_min_ten_cnt<=0;bcd_hour_one_cnt<=0;bcd_hour_ten_cnt<=0;seg_flash_data_r<=4‘b0000;end
else
begin
case(mode)
0: begin seg_flash_data_r<=4‘b0000;
bcd_seg_display_num_r[15:0] <= {bcd_min_ten_cnt,bcd_min_one_cnt,bcd_sec_ten_cnt,bcd_sec_one_cnt};
if(count1 == T_1S)begin if(bcd_sec_one_cnt==9)
begin bcd_sec_one_cnt<=0; if(bcd_sec_ten_cnt==5)
begin bcd_sec_ten_cnt<=0;if(bcd_min_one_cnt==9)
begin bcd_min_one_cnt<=0;if(bcd_min_ten_cnt==5)
begin bcd_min_ten_cnt<=0;if(bcd_hour_ten_cnt==2&&bcd_hour_one_cnt==3)begin bcd_hour_ten_cnt<=0;bcd_hour_one_cnt<=0;end
else if(bcd_hour_one_cnt==9)begin bcd_hour_one_cnt<=0;bcd_hour_ten_cnt<=bcd_hour_ten_cnt+1;end
else bcd_hour_one_cnt<=bcd_hour_one_cnt+1;
end
else bcd_min_ten_cnt<=bcd_min_ten_cnt+1;end
else bcd_min_one_cnt<=bcd_min_one_cnt+1;end
else bcd_sec_ten_cnt<=bcd_sec_ten_cnt+1;end
else bcd_sec_one_cnt<=bcd_sec_one_cnt+1;end end
/* 1: begin seg_flash_data_r <= 4‘b0001;
if(key_value==6&key_flag==1)seg_flash_data_r[3:0] <= {seg_flash_data_r[2:0],seg_flash_data_r[3]}; //左移要调整的位
if(key_value==14&key_flag==1)seg_flash_data_r[3:0] <= {seg_flash_data_r[0],seg_flash_data_r[3:1]};//右移要调整的位
bcd_seg_display_num_r[15:0] <= {bcd_min_ten_cnt,bcd_min_one_cnt,bcd_sec_ten_cnt,bcd_sec_one_cnt}; //秒分调整显示界面
if(seg_flash_data_r[0]==1&key_value==13&key_flag==1)begin if(bcd_sec_one_cnt==9)bcd_sec_one_cnt<=0; else bcd_sec_one_cnt<=bcd_sec_one_cnt+1;end
if(seg_flash_data_r[1]==1&key_value==12&key_flag==1)begin if(bcd_sec_ten_cnt==5)bcd_sec_ten_cnt<=0;else bcd_sec_ten_cnt<=bcd_sec_ten_cnt+1;end
if(seg_flash_data_r[2]==1&key_value==9&key_flag==1)begin if(bcd_min_one_cnt==9)bcd_min_one_cnt<=0;else bcd_min_one_cnt<=bcd_min_one_cnt+1;end
if(seg_flash_data_r[3]==1&key_value==8&key_flag==1)begin if(bcd_min_ten_cnt==5)bcd_min_ten_cnt<=0;else bcd_min_ten_cnt<=bcd_min_ten_cnt+1;end end
2:begin bcd_seg_display_num_r[15:0] <= {bcd_hour_ten_cnt,bcd_hour_one_cnt,bcd_min_ten_cnt,bcd_min_one_cnt}; seg_flash_data_r<=4‘b0000;end
3:begin seg_flash_data_r<=4‘b0001;
if(key_value==6&key_flag==1)seg_flash_data_r[3:0] <= {seg_flash_data_r[2:0],seg_flash_data_r[3]};
if(key_value==14&key_flag==1)seg_flash_data_r[3:0] <= {seg_flash_data_r[0],seg_flash_data_r[3:1]};
bcd_seg_display_num_r[15:0] <= {bcd_hour_ten_cnt,bcd_hour_one_cnt,bcd_min_ten_cnt,bcd_min_one_cnt};
if(seg_flash_data_r[0]==1&key_value==13&key_flag==1)begin if(bcd_min_one_cnt==9)bcd_sec_one_cnt<=0; else bcd_sec_one_cnt<=bcd_sec_one_cnt+1;end
if(seg_flash_data_r[1]==1&key_value==12&key_flag==1)begin if(bcd_min_ten_cnt==5)bcd_sec_ten_cnt<=0;else bcd_sec_ten_cnt<=bcd_sec_ten_cnt+1;end
if(seg_flash_data_r[2]==1&key_value==5&key_flag==1)begin if(bcd_hour_one_cnt==9)bcd_hour_one_cnt<=0;else bcd_hour_one_cnt<=bcd_hour_one_cnt+1;end
if(seg_flash_data_r[3]==1&key_value==4&key_flag==1)begin if(bcd_hour_ten_cnt==2)bcd_hour_ten_cnt<=0;else bcd_hour_ten_cnt<=bcd_hour_ten_cnt+1;end end*/
1 :begin seg_flash_data_r<=4‘b1000;
bcd_seg_display_num_r[15:0] <= {bcd_hour_ten_cnt,bcd_hour_one_cnt,bcd_min_ten_cnt,bcd_min_one_cnt};
if(key_value==4&key_flag==1)begin if(bcd_hour_ten_cnt==2)bcd_hour_ten_cnt<=0;else bcd_hour_ten_cnt<=bcd_hour_ten_cnt+1;end end
2: begin
seg_flash_data_r<=4‘b0100;
bcd_seg_display_num_r[15:0] <= {bcd_hour_ten_cnt,bcd_hour_one_cnt,bcd_min_ten_cnt,bcd_min_one_cnt};
if(key_value==5&key_flag==1)begin if(bcd_hour_one_cnt==9)bcd_hour_one_cnt<=0;else bcd_hour_one_cnt<=bcd_hour_one_cnt+1;end end
3: begin
seg_flash_data_r<=4‘b0010;
bcd_seg_display_num_r[15:0] <= {bcd_hour_ten_cnt,bcd_hour_one_cnt,bcd_min_ten_cnt,bcd_min_one_cnt};
if(key_value==8&key_flag==1)begin if(bcd_min_ten_cnt==5)bcd_min_ten_cnt<=0;else bcd_min_ten_cnt<=bcd_min_ten_cnt+1;end end
4: begin
seg_flash_data_r<=4‘b0001;
bcd_seg_display_num_r[15:0] <= {bcd_hour_ten_cnt,bcd_hour_one_cnt,bcd_min_ten_cnt,bcd_min_one_cnt};
if(key_value==9&key_flag==1)begin if(bcd_min_one_cnt==9)bcd_min_one_cnt<=0;else bcd_min_one_cnt<=bcd_min_one_cnt+1;end end
5:begin
seg_flash_data_r<=4‘b0010;
bcd_seg_display_num_r[15:0] <= {bcd_min_ten_cnt,bcd_min_one_cnt,bcd_sec_ten_cnt,bcd_sec_one_cnt};
if(key_value==12&key_flag==1)begin if(bcd_sec_ten_cnt==5)bcd_sec_ten_cnt<=0;else bcd_sec_ten_cnt<=bcd_sec_ten_cnt+1;end end
6:begin
seg_flash_data_r<=4‘b0001;
bcd_seg_display_num_r[15:0] <= {bcd_min_ten_cnt,bcd_min_one_cnt,bcd_sec_ten_cnt,bcd_sec_one_cnt};
if(key_value==13&key_flag==1)begin if(bcd_sec_one_cnt==9)bcd_sec_one_cnt<=0; else bcd_sec_one_cnt<=bcd_sec_one_cnt+1;end end
//default:begin bcd_sec_one_cnt<=0;bcd_sec_ten_cnt<=0;bcd_min_one_cnt<=0;bcd_min_ten_cnt<=0;bcd_hour_one_cnt<=0;bcd_hour_ten_cnt<=0;end
endcase
end
assign seg_flash_data[3:0] = Flag_1S_r ?seg_flash_data_r[3:0]:4‘b0000;
assign bcd_seg_display_num[15:0] = bcd_seg_display_num_r[15:0];
wire alarm =(bcd_hour_ten_cnt==1&&bcd_hour_one_cnt==2&&bcd_min_ten_cnt==0&&bcd_min_one_cnt==0&&bcd_sec_ten_cnt==0&&bcd_sec_one_cnt==0);
reg [26:0]beep_count;
always@(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
beep_count <= 0;
end
else if(alarm)
beep_count <= 27‘d125000000;
else if(beep_count>0)
beep_count <= beep_count - 1;
end
assign alarm_beep = (beep_count>0 && ((beep_count[24]&& beep_count[14])||(~beep_count[24]&& beep_count[13])));
endmodule
显示控制模块
module seg595_control_module(clk,rst_n,num1_ten_smg_data,num1_one_smg_data,num2_ten_smg_data,num2_one_smg_data,seg_flash_data,duan_wei_data,Flag_1S,start_sig,done_sig);
input clk;
input rst_n;
input [7:0] num1_ten_smg_data;
input [7:0] num1_one_smg_data;
input [7:0] num2_ten_smg_data;
input [7:0] num2_one_smg_data;
input [3:0] seg_flash_data;
output [15:0]duan_wei_data;
output start_sig;
input done_sig;
input Flag_1S;
parameter T_1S=25000000;
//parameter T_1S=2500;
reg [15:0]duan_wei_data_r;
reg start_sig_r;
reg [3:0]state;
always@(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
state<=0;
start_sig_r <= 1‘b0;
end
else
case (state)
0:
begin duan_wei_data_r[15:0] <= {num2_one_smg_data,8‘h27}; state <= state + 1; start_sig_r <= 1‘b1; end
1:
begin start_sig_r <= 1‘b0; state<=4; end
2:
if(done_sig) begin duan_wei_data_r[15:0] <= {(seg_flash_data[3]?8‘h00:num2_ten_smg_data),Flag_1S?8‘h1e:8‘h2e}; state <= state + 1; start_sig_r <= 1‘b1; end//{num2_ten_smg_data,4‘h2,(4‘he&seg_flash_data)}; state <= state + 1; start_sig_r <= 1‘b1; end
3:
begin start_sig_r <= 1‘b0; state <= state + 1; end
4:
if(done_sig) begin duan_wei_data_r[15:0] <= {(seg_flash_data[2]?8‘h00:num2_one_smg_data),Flag_1S?8‘h1d:8‘h2d};state <= state + 1; start_sig_r <= 1‘b1; end//{num2_one_smg_data,4‘h2,(4‘hd&seg_flash_data)};state <= state + 1; start_sig_r <= 1‘b1; end
5:
begin start_sig_r <= 1‘b0; state <= state + 1; end
6:
if(done_sig) begin duan_wei_data_r[15:0] <= {(seg_flash_data[1]?8‘h00:num1_ten_smg_data),Flag_1S?8‘h1b:8‘h
b}; state <= state + 1; start_sig_r <= 1‘b1; end//{num1_ten_smg_data,4‘h2,(4‘hb&seg_flash_data)}; state <= state + 1; start_sig_r <= 1‘b1; end
7:
begin start_sig_r <= 1‘b0; state <= state + 1; end
8:
if(done_sig) begin duan_wei_data_r[15:0] <= {(seg_flash_data[0]?8‘h00:num1_one_smg_data),Flag_1S?8‘h17:8‘h27}; state <= state + 1; start_sig_r <= 1‘b1; end//{num1_one_smg_data,4‘h2,(4‘h7&seg_flash_data)}; state <= state + 1; start_sig_r <= 1‘b1; end
9:
begin start_sig_r <= 1‘b0; state<=2; end
default:
begin state <= 0; start_sig_r <= 1‘b0; end
endcase
end
assign start_sig = start_sig_r;
assign duan_wei_data = duan_wei_data_r;
endmodule
显示模块
module seg595_function_module(clk,rst_n,duan_wei_data,start_sig,done_sig,sck,rck,dout);
input clk;
input rst_n;
input [15:0]duan_wei_data;
input start_sig;
output done_sig;
output sck;
output rck;
output dout;
//分出5M频率
reg [2:0]count1;
reg sck_r;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin count1<=0; sck_r<=0; end
else if(count1 == 3‘d4)
begin count1<=0; sck_r = ~ sck_r; end
else count1 <= count1 +1 ;
end
//整出下降沿脉冲
reg sck_flag1;
reg sck_flag2;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
sck_flag1 <= 1‘b1;
sck_flag2 <= 1‘b1;
end
else
begin
sck_flag1 <= sck_r;
sck_flag2 <= sck_flag1;
end
end
wire sck_negedge;
assign sck_negedge= (sck_flag2 && ~sck_flag1)?1‘b1:1‘b0;
reg [6:0]state;
reg rck_r;
reg dout_r;
reg done_sig_r;
// 每一个sck,下降沿放入数据,上升沿到,输入输出。 rck 每16个sck拉高一次。
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
dout_r <= 0;
state <= 0;
done_sig_r <= 1‘b0;
end
else
case (state)
0: if(start_sig) state <= state + 1;
1: if(sck_negedge)begin dout_r <= duan_wei_data[15]; rck_r <= 1‘b1; state <= state + 1; end
2: if(sck_negedge)begin dout_r <= duan_wei_data[14]; state <= state + 1; end
3: if(sck_negedge)begin dout_r <= duan_wei_data[13]; state <= state + 1; end
4: if(sck_negedge)begin dout_r <= duan_wei_data[12]; state <= state + 1; end
5: if(sck_negedge)begin dout_r <= duan_wei_data[11]; state <= state + 1; end
6: if(sck_negedge)begin dout_r <= duan_wei_data[10]; state <= state + 1; end
7: if(sck_negedge)begin dout_r <= duan_wei_data[9]; state <= state + 1; end
8: if(sck_negedge)begin dout_r <= duan_wei_data[8]; state <= state + 1; end
9: if(sck_negedge)begin dout_r <= duan_wei_data[7]; state <= state + 1; end
10: if(sck_negedge)begin dout_r <= duan_wei_data[6]; state <= state + 1; end
11: if(sck_negedge)begin dout_r <= duan_wei_data[5]; state <= state + 1; end
12: if(sck_negedge)begin dout_r <= duan_wei_data[4]; state <= state + 1; end
13: if(sck_negedge)begin dout_r <= duan_wei_data[3]; state <= state + 1; end
14: if(sck_negedge)begin dout_r <= duan_wei_data[2]; state <= state + 1; end
15: if(sck_negedge)begin dout_r <= duan_wei_data[1]; state <= state + 1; end
16: if(sck_negedge)begin dout_r <= duan_wei_data[0]; rck_r <= 1‘b0; state <= state + 1; done_sig_r <= 1‘b1; end
17: begin done_sig_r <= 1‘b0; state <= 0; end
default: begin dout_r <= 0; state <= 0; done_sig_r <= 1‘b0; end
endcase
end
assign done_sig = done_sig_r;
assign dout = dout_r;
assign rck = rck_r;
assign sck = sck_r;
endmodule
数码管解码模块
module smg_encoder_module(clk,rst_n,num,smg_data);
input clk;
input rst_n;
input [3:0]num;
output [7:0]smg_data;
/*共阴极数码管: 位选为低电平(即0)选中数码管; 各段选为高电平(即1接+5V时)选中各数码段;*/
//由0到f的编码为
parameter
SEG_NUM0=8‘h3f,
SEG_NUM1=8‘h06,
SEG_NUM2=8‘h5b,
SEG_NUM3=8‘h4f,
SEG_NUM4=8‘h66,
SEG_NUM5=8‘h6d,
SEG_NUM6=8‘h7d,
SEG_NUM7=8‘h07,
SEG_NUM8=8‘h7f,
SEG_NUM9=8‘h6f,
SEG_NUMA=8‘h77,
SEG_NUMB=8‘h7c,
SEG_NUMC=8‘h39,
SEG_NUMD=8‘h5e,
SEG_NUME=8‘h79,
SEG_NUMF=8‘h71;
reg [7:0]smg_data_r;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
smg_data_r <= 8‘b00000000;
else
case (num)
4‘d0: smg_data_r <= SEG_NUM0;
4‘d1: smg_data_r <= SEG_NUM1;
4‘d2: smg_data_r <= SEG_NUM2;
4‘d3: smg_data_r <= SEG_NUM3;
4‘d4: smg_data_r <= SEG_NUM4;
4‘d5: smg_data_r <= SEG_NUM5;
4‘d6: smg_data_r <= SEG_NUM6;
4‘d7: smg_data_r <= SEG_NUM7;
4‘d8: smg_data_r <= SEG_NUM8;
4‘d9: smg_data_r <= SEG_NUM9;
default: smg_data_r <= 8‘b00000000;
endcase
end
assign smg_data=smg_data_r;
endmodule
标签:
原文地址:http://www.cnblogs.com/xinshuwei/p/5647974.html