标签:
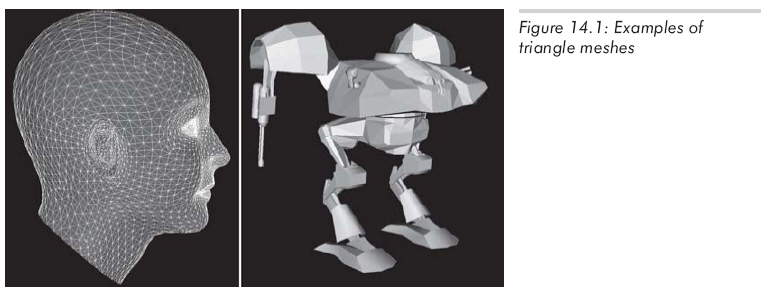
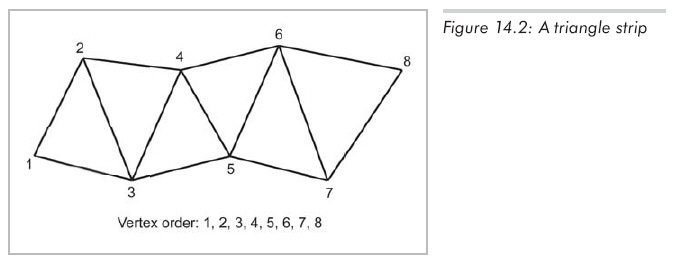
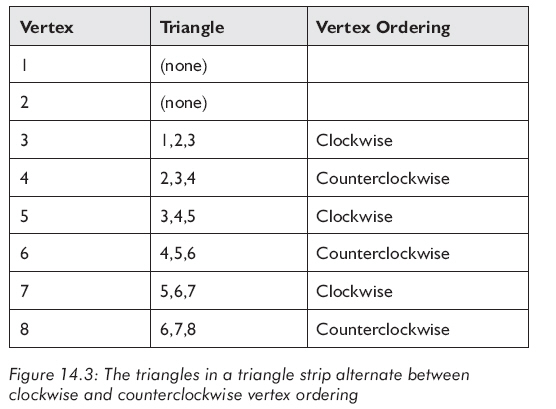
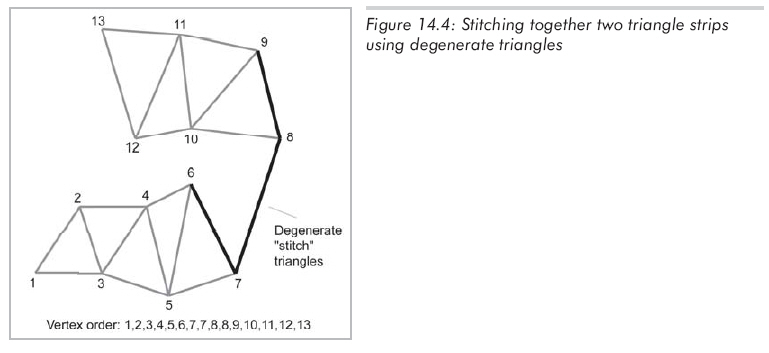
三角网格(Triangle Mesh)
使用道具 举报
管理员
3D math primer for graphics and game development
原文地址:http://www.cnblogs.com/haoyul/p/5686513.html
 分享
分享 收藏
收藏


