标签:images nic lsp 没有 运行 else 关联 调用 创建
感谢唯笑志在分享
原博主原地址:
http://www.cnblogs.com/lsjwq/
目 录
7. 自控通讯模式开发及注意事项... 2
7.1 概述... 2
7.2 通讯机制说明... 2
7.3 设备驱动开发注意事项... 3
7.3.1 实时发送数据... 3
7.3.2 发送固定实时请求数据命令... 4
7.3.3 优先发送其他数据... 4
7.3.4 如何选择IO通道发送数据... 5
7.3.5 如何以DeviceCode分配数据... 5
7.3.6 如何改变设备驱动的状态... 6
7.4 宿主程序服务实例配置注意事项... 6
7.5 自控模式运行效果... 8
自控通讯模式与并发通讯模式类似,唯一的区别是发送请求数据命令,自控通讯模式可以使用定时器,定时发送请求数据命令,不再像并发通讯模式集中发送。
在工业物联网建设中,设备不同、协议不同、场景不同,对于某些不同的设备定时采集数据的频率也不一样,过于高频的数据采集也是对资源的一种浪费,所以就供给二次开发者在开发设备驱动的时候更自主的控制模式。
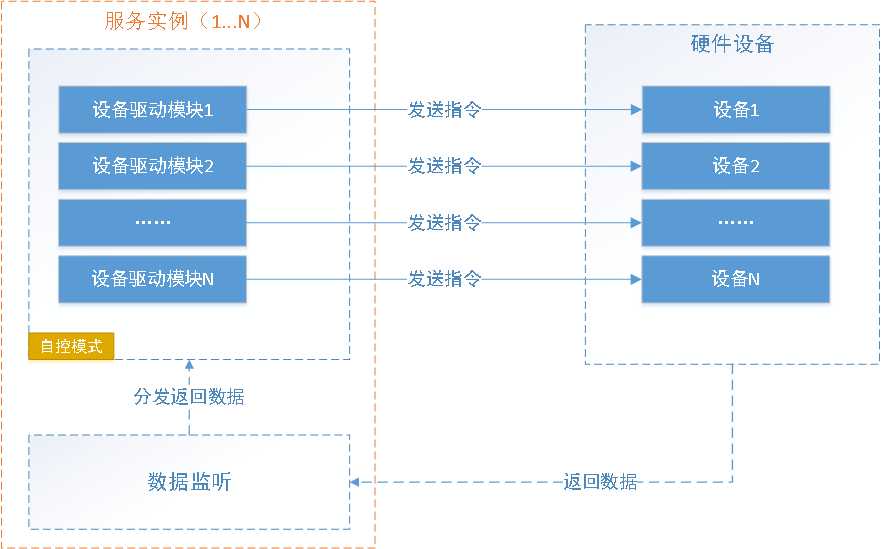
只有网络通讯时可以使用这种控制模式。自控通讯模式与并发通讯模式类似,区别在于发送指令操作交给设备驱动本身进行控制,或者说交给二次开发者,二次开发者可以通过时钟定时用事件驱动的方式发送指令数据。硬件设 备接收到指令后进行校验,校验成功后返回对应指令的数据,通讯平台异步监听到数据信息后,进行接收操作,然后再进行数据的分发、处理等。
自控通讯模式可以为二次开发者提供精确的定时请求实时数据机制,使通讯机制更灵活、自主,如果多个设备驱动共享使用同一个IO通道的话,时间控制会有偏差。
同样涉及到数据的分发,和并发模式一样。通讯结构如下图:
ServerSuperIO框架的IRunDevice驱动接口有一个GetSendBytes函数,此函数接口会同时协调调用GetConstantCommand固定请求数据接口和SendCache发送数据的缓存器,并设置设备的优先级别进行调度。
可以继承以前写的设备驱动,在此基础上增加定时发送数据的代码。代码如下:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
|
public class DeviceSelfDriver:DeviceDriver { public DeviceSelfDriver() : base() { } public override void Initialize(string devid) { base.Initialize(devid); this.RunTimerInterval = 5000; this.IsRunTimer = true; } public override void OnRunTimer() { byte[] data = this.GetSendBytes(); OnSendData(data); base.OnRunTimer(); } } |
自控通讯模式定时发送请求数据命令,同样是以呼叫应答的方式向设备发送请求实时数据命令,对于同一个设备的请求实时数据命令一般相对固定。在调度某一具体设备驱动的时候,会调用固定的调用IRunDevice驱动接口的GetConstantCommand函数,以获得请求实时数据的命令。代码如下:
|
1
2
3
4
5
6
7
|
public override byte[] GetConstantCommand(){ byte[] data = this.Protocol.DriverPackage<String>("0", "61", null); string hexs = BinaryUtil.ByteToHex(data); OnDeviceRuningLog("发送>>"+hexs); return data; } |
this.Protocol.DriverPackage驱动调用61命令获得要发送的命令,并返回byte[]数组,ServerSuperIO获得数据后会自动通过IO接口下发命令数据。如果返回null类型,系统不进行下发操作。
对于一个设备不可能只有一个读实时数据的命令,可能还存在其他命令进行交互,例如:读参数、实时校准等,这时就需要进行优先级调度发送数据信息。可以通过两种方式让ServerSuperIO框架优先调度该设备驱动。
|
1
|
this.Protocol.SendCache.Add("读参数",readParaBytes); |
2.设置设备的优先级别属性,代码如下:
|
1
|
this.DevicePriority=DevicePriority.Priority; |
集中发送数据时,涉及到如何关联设备驱动与IO通道,框架会以DeviceParameter.NET.RemoteIP设置的终端IP参数进行选择IO通道发送数据。但是如果终端设备是动态IP地址的话,那么RemoteIP参数也应该是变动的。这时就需要设置服务实例是以DeviceCode的方式分布数据到设备驱动,终端设备先发送简单的验证数据,保证发送的DeviceCode与设备驱动的相对应,设备驱动接收到验证数据后需要保存临时的RemoteIP信息,这样保证在发送数据的时候参数准确找到要请求数据的IO通道到终端设备。
例如下面代码:
|
1
2
3
4
5
6
|
public override void Communicate(ServerSuperIO.Communicate.IRequestInfo info){ this.DeviceParameter.NET.RemoteIP = info.Channel.Key; this.DeviceParameter.Save(this.DeviceParameter); ……} |
如果服务实例设置以DeliveryMode.DeviceCode模式分配数据,那么就需要在通讯协议接口里实现过滤DeviceCode编码的接口。
例如下面的代码:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
|
internal class DeviceProtocol:ProtocolDriver { public override string GetCode(byte[] data) { byte[] head = new byte[] {0x55, 0xaa}; int codeIndex = data.Mark(0, data.Length, head); if (codeIndex == -1) { return String.Empty; } else { return data[codeIndex + head.Length].ToString(); } }} |
不像轮询通讯模式,发送数据、接收数据是一个轮回,在接收数据的过程后驱动设备驱动,设备执行整个生命周期的流程,根据接收到的数据,会自动改变设备驱动的状态。
自控通讯模式和并发通讯模式更多强调请求数据的方式不同,那么不能一直发送请求数据命令,而设备状态一直不改变,例如:通讯正常变成了通讯中断、通讯中断变成了通讯正常。这两种通讯模式的发送与接收过程有一个协调机制,发送3次请求数据命令,而没有接收到任何数据,会自动调用设备驱动的接口,以驱动设备驱动的整个执行的流程,这样设备的状态会自动发生改变,而不需要二次开发写相应的代码。
在宿主程序中创建服务实例的时候,需要把服务实例的配置参数设置为自控通讯模式,并启动服务实例,把实例化的设备驱动增加到该服务实例中。代码如下:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
|
static void Main(string[] args) { DeviceDriver dev1 = new DeviceDriver(); dev1.DeviceParameter.DeviceName = "串口设备"; dev1.DeviceParameter.DeviceAddr = 0; dev1.DeviceParameter.DeviceID = "0"; dev1.DeviceDynamic.DeviceID = "0"; dev1.DeviceParameter.DeviceCode = "0"; dev1.DeviceParameter.COM.Port = 1; dev1.DeviceParameter.COM.Baud = 9600; dev1.CommunicateType = CommunicateType.COM; dev1.Initialize("0"); DeviceSelfDriver dev2 = new DeviceSelfDriver(); dev2.DeviceParameter.DeviceName = "网络设备"; dev2.DeviceParameter.DeviceAddr = 1; dev2.DeviceParameter.DeviceID = "1"; dev2.DeviceDynamic.DeviceID = "1"; dev2.DeviceParameter.DeviceCode = "1"; dev2.DeviceParameter.NET.RemoteIP = "127.0.0.1"; dev2.DeviceParameter.NET.RemotePort = 9600; dev2.CommunicateType = CommunicateType.NET; dev2.Initialize("1"); IServer server = new ServerManager().CreateServer(new ServerConfig() { ServerName = "服务1", ComReadTimeout = 1000, ComWriteTimeout = 1000, NetReceiveTimeout = 1000, NetSendTimeout = 1000, ControlMode = ControlMode.Self, SocketMode = SocketMode.Tcp, StartReceiveDataFliter = false, ClearSocketSession = false, StartCheckPackageLength = false, CheckSameSocketSession = false, DeliveryMode = DeliveryMode.DeviceCode, }); server.AddDeviceCompleted += server_AddDeviceCompleted; server.DeleteDeviceCompleted+=server_DeleteDeviceCompleted; server.Start(); server.AddDevice(dev1); server.AddDevice(dev2); while ("exit" == Console.ReadLine()) { server.Stop(); }} |
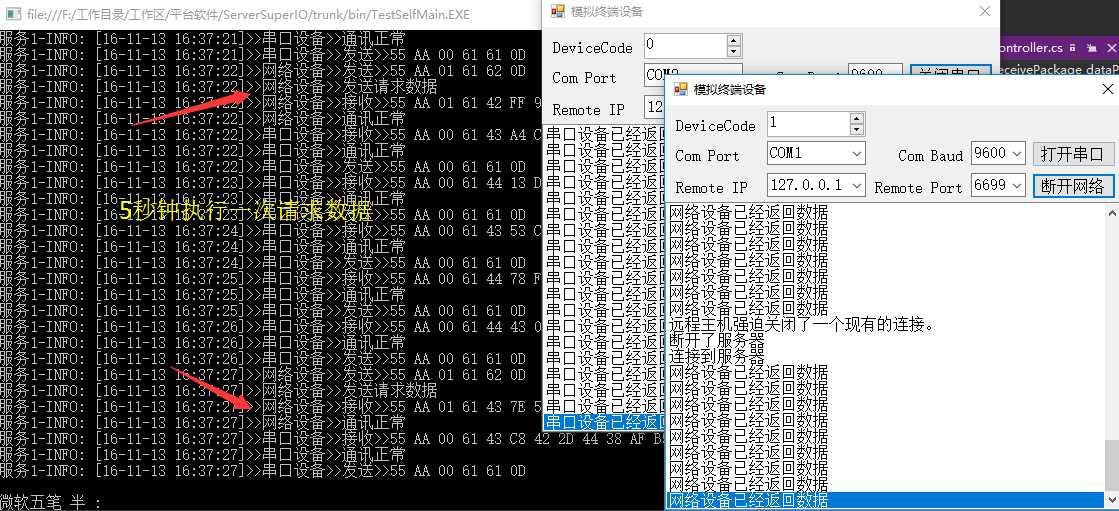
ControlMode = ControlMode. Self代码是设置服务实例调度设备为并发控制模式;以DeliveryMode = DeliveryMode.DeviceCode方式进行数据分发,当然我现在模拟的是固定的终端IP。
1.图片
《连载 | 物联网框架ServerSuperIO教程》- 7.自控通讯模式开发及注意事项
标签:images nic lsp 没有 运行 else 关联 调用 创建
原文地址:http://www.cnblogs.com/CoderJYF/p/6091432.html