标签:读数 时间 数字信号 clear 使用 ad模式 s5pv210 gis git
1:ADC:Analog-to-Digital Converter,模拟信号转数字信号,自然界一般为模拟信号,而SoC需要数字信号,所以之间通信需要ADC。
2:转换原理:
以逐次逼近式AD转换为例:
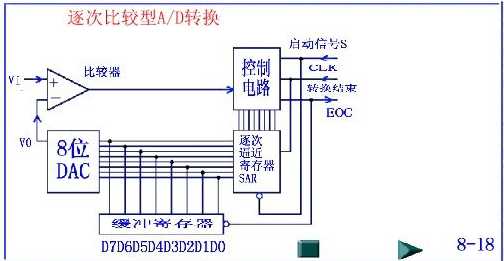
这里以8位为例,而S5pv210SoC是可选10bit、12bit;
(1) 首先发出“启动信号”信号S。当S由高变低时,“逐次逼近寄存器SAR”清0,DAC输出Vo=0,“比较器”输出1。当S变为高电平时, “控制电路”使SAR开始工作。
(2) SAR首先产生8位数字量的一半,即10000000B,试探模拟量的Vi大小,若Vo>Vi,“控制电路”清除最高位,若Vo<Vi,保留最高位。
(3) 在最高位确定后,SAR又以对分搜索法确定次高位,即以低7位的一半y1000000B(y为已确定位) 试探模拟量Vi的大小。在bit6确定后,SAR以对分搜索法确定bit5位,即以低6位的一半yy100000B(y为已确定位) 试探模拟量Vi的大小。重复这一过程,直到最低位bit0被确定。
(4) 在最低位bit0确定后,转换结束,“控制电路”发出“转换结束”信号EOC。该信号的下降沿把SAR的输出锁存在“缓冲寄存器”里,从而得到数字量输出。 从转换过程可以看出: 启动信号为负脉冲有效。 转换结束信号为低电平。
例如满量程应该是5V,所以,第一次DA输出2.5V,输入电压与2.5V比较,输入电压大,故而取2.5V-5V之间,即最高位保留1。然后在新的范围内取中间电压,即3.75V,依此类推。。。。
3:S5pv210的ADC特性
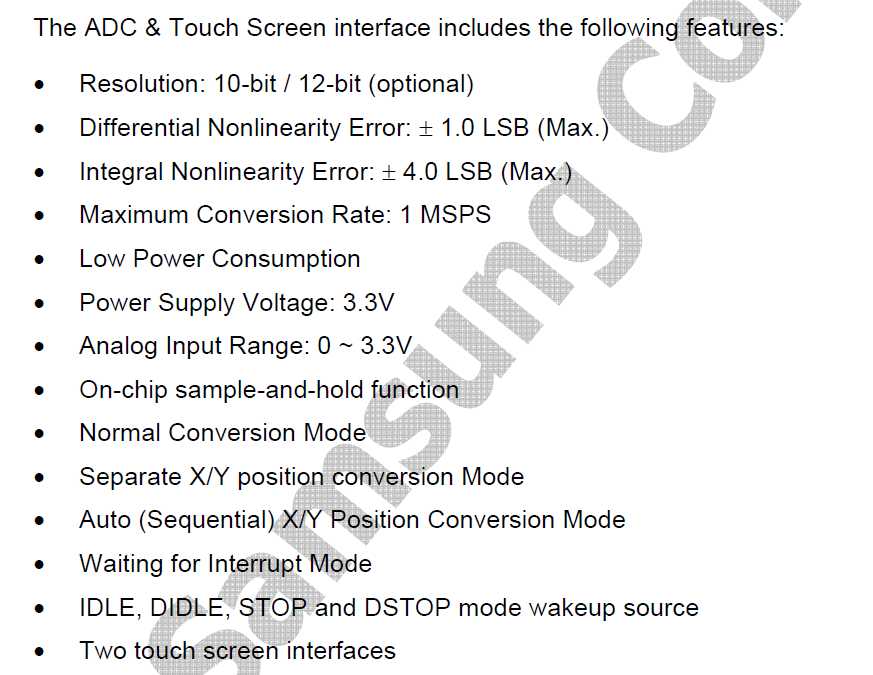
(1) 精度10bit/12bit;
(2) 最大转换速率1MSPS
(3) 模拟电压范围0-3.3
(4) 可设置普通AD模式(即TOUCH SCREEN触摸屏模式切换为普通AD模式)
3:AD工作时钟时钟频率

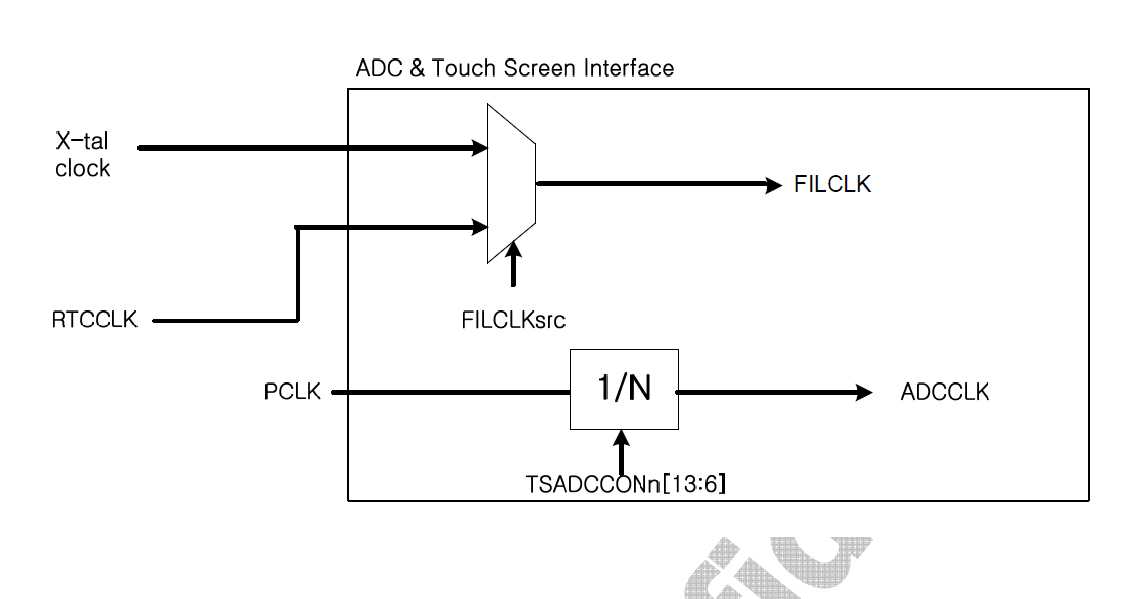
S5pv210的ADC时钟接在PCLC_PSYS总线上(PCLC_PSYS时钟总线频率为66MHz),一般设置分频器位65,对用的ADC时钟位1MHz,此时的转换速率为1/200KHz,
最大ADC时钟可设置为5MHz,对应的最大转换速率为1MSPS。
4:ADC数据可以通过轮询、中断两种方式来获取;采用中断模式的话,转换时间受中断历程的返回时间以及数据的读取时间影响而延迟。采用轮询方式,只要访问状态寄存器TSADCCONn,
即可知道是否转换完成。转换完成以后读取TSDATXn、TSDATYn两个寄存器的值即可。

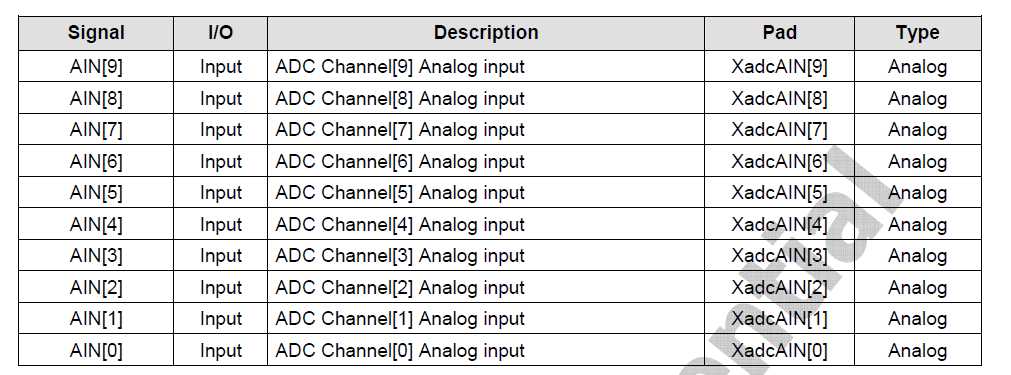
5:s5pv210的10个ADC引脚AIN[0]~AIN[9]分别对应XadcAIN[0]~XadcAIN[9]引脚
6:常用寄存器
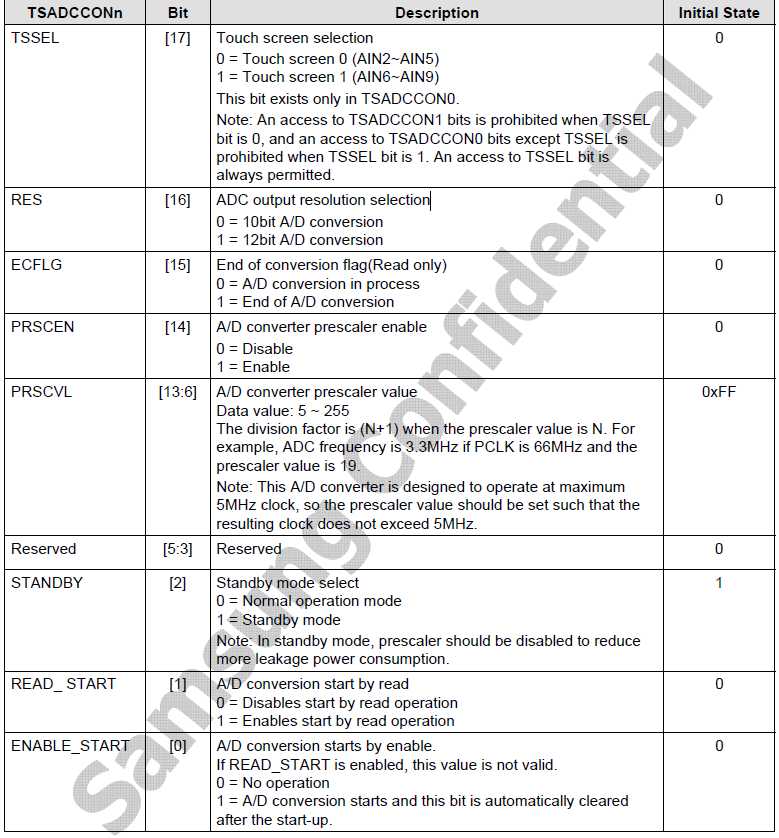
TSADCCON0:
bit16设置AD转换精度,10bit、12bit可选;
bit15只读,状态寄存器,查看是否转换结束;
bit14预分频器开关,设置为1;
bit13:6分频倍率,如要设置3.3MHz,可设置为19,66/19+1=3.3,最大设置频率为5MHz,所以此位最小值为:13
bit2设置为普通模式即可
bit1是否开启read star模式,read star模式意思是只要读取AD转换后的寄存器数据,即重新开始AD转换,使用这种模式第一次读数据要丢掉;
bit0开启AD转换,如果设置了read star模式,此位无效;
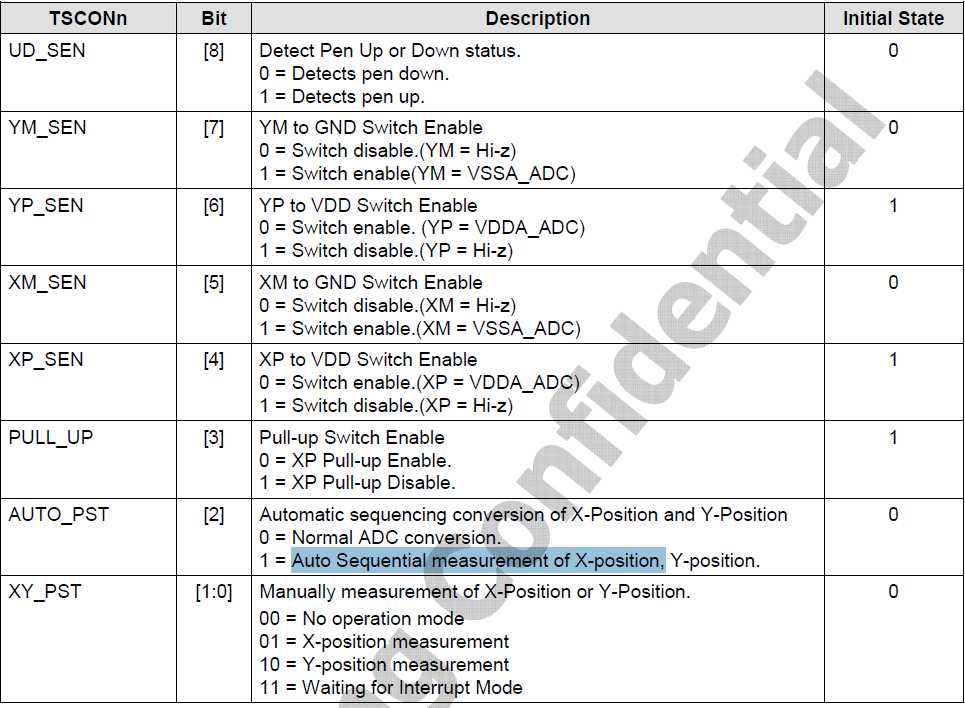
TSCONn:touch screen控制寄存器。
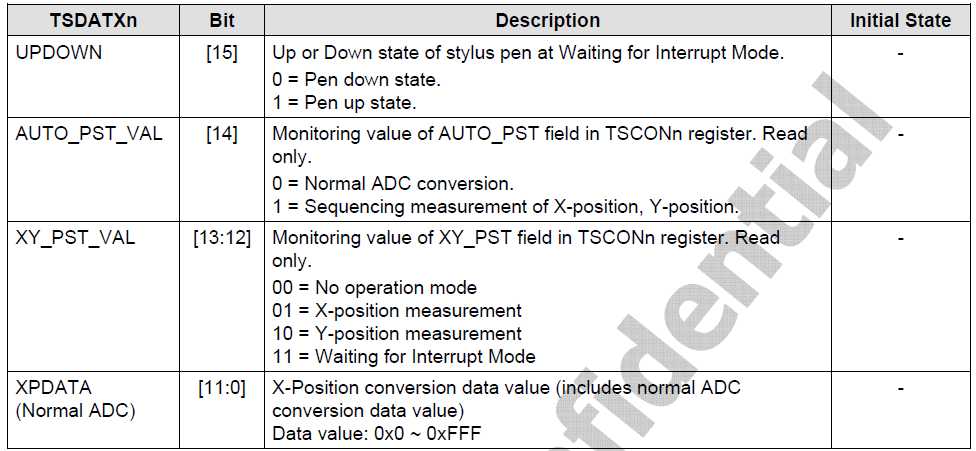
TSDATXn:数据寄存器
bit14查看输出数据位ADC 还是TOUCH SCREEN
bit11:0为转换后的数据
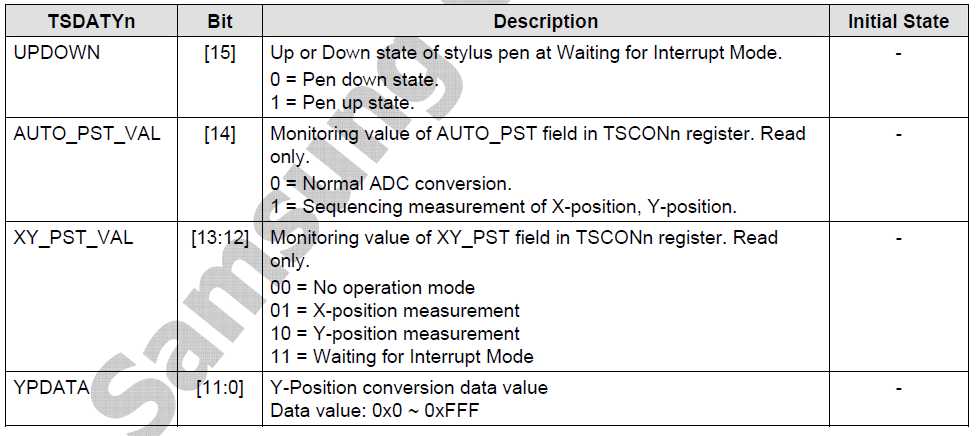
TSDATYn:数据寄存器
bit14查看输出数据位ADC 还是TOUCH SCREEN
bit11:0为转换后的数据
CLRINADCn:清中断写入任意一个值就可以;ADC Interrupt Clear Register

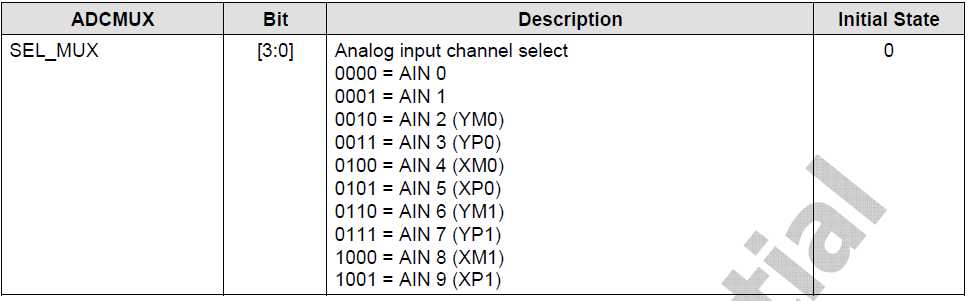
ADMUX寄存器
7:编程
#define TSADCCON0 0xE1700000
#define TSCON0 0xE1700004
#define TSDATX0 0xE170000C
#define TSDATY0 0xE1700010
#define CLRINTADC0 0xE1700018
#define ADCMUX 0xE170001C
#define _REG_TSADCCON0 *(unsigned int*)0xE1700000
#define _REG_TSCON0 *(unsigned int*)0xE1700004
#define _REG_TSDATX0 *(unsigned int*)0xE170000C
#define _REG_TSDATY0 *(unsigned int*)0xE1700010
#define _REG_CLRINTADC0 *(unsigned int*)0xE1700018
#define _REG_ADCMUX *(unsigned int*)0xE170001C
static void adc_init(void)
{
_REG_TSADCCON0 |= (1 << 16); //设置精度为12bit
_REG_TSADCCON0 |= (1 << 14); //使能presaler
_REG_TSADCCON0 &= ~(0xFF << 6); //设置时钟
_REG_TSADCCON0 |= (65 << 6);
_REG_TSADCCON0 &= ~(1 << 2); //standby为normal模式
_REG_TSADCCON0 &= ~(1 << 1); //read_start disable
_REG_ADCMUX &= ~(0xF << 0); //设置mux开关为ACD1
}
static void delay_1(void){
volatile int x, y;
for(x=0; x<5000; x++) {
for(y=0; y<1000; y++)
;
}
}
void adc_test(void)
{
unsigned int valx, valy;
adc_init();
while(1) {
//开始ADC转换
_REG_TSADCCON0 |= (1 << 0);
//读取状态位,是否转换完毕,如果bit15位0的话,一直读取
while (!(_REG_TSADCCON0 & (1 << 15))) {
0;
}
//读取ADC转换后的数据
valx = _REG_TSDATX0;
valy = _REG_TSDATY0;
printf("x:bit14 = %d\n", (valx & (1 << 14)));
printf("x:bit11-0 = %d\n", (valx & (0xFFF << 0)));
printf("y:bit14 = %d\n", (valy & (1 << 14)));
printf("y:bit11-0 = %d\n", (valy & (0xFFF << 0)));
delay_1();
}
}
标签:读数 时间 数字信号 clear 使用 ad模式 s5pv210 gis git
原文地址:http://www.cnblogs.com/biaohc/p/6286569.html