标签:图片 曝光 tga simple main error ace imshow details
上次的图像拼接效果还是不够好,有鬼影。所有一直在想怎么解决。
才发现基于拉普拉斯金字塔的图像融合是可以的。然后就找到原来还有最佳拼接缝一说。然后发现opencv高版本是带这个的,但是怎么解决呢?
http://blog.csdn.net/wd1603926823/article/details/49536691
http://blog.csdn.net/hanshuning/article/details/41960401
http://blog.csdn.net/manji_lee/article/details/9002228
还没解决
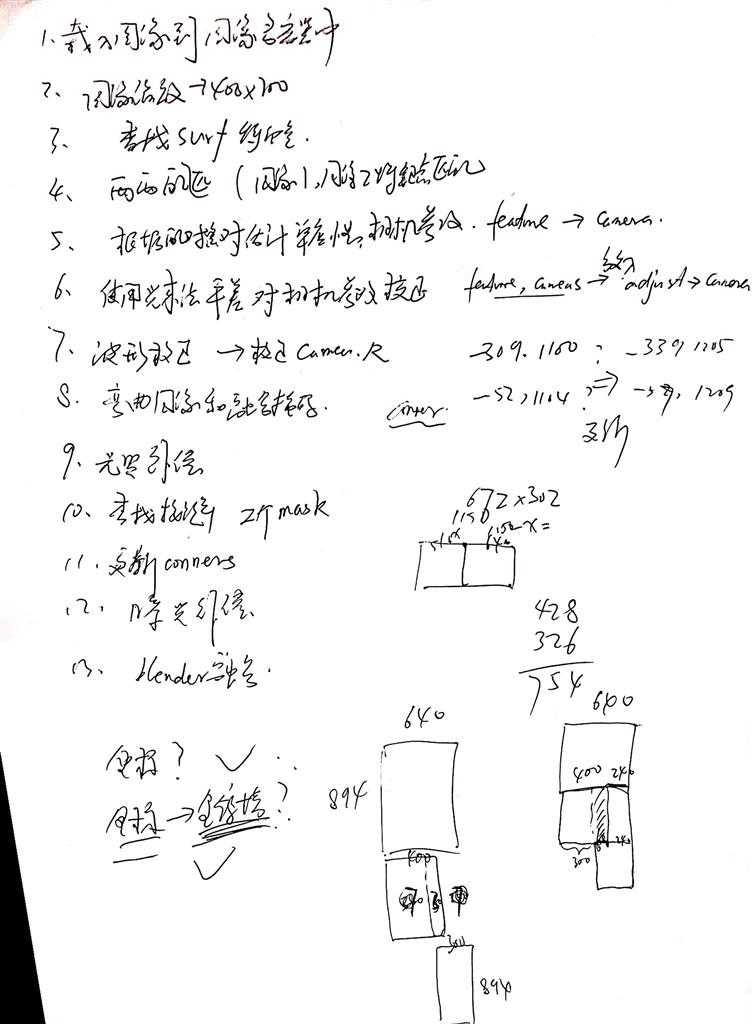
1 找最佳缝合线模板
2 调用拉普拉斯进行多分辨率融合
opencv自带的stitch 貌似必须2.4版本以上才行,代码:

1 #include "stdafx.h"
2 #include <iostream>
3 #include <fstream>
4 #include <string>
5 #include "opencv2/opencv_modules.hpp"
6 #include "opencv2/highgui/highgui.hpp"
7 #include "opencv2/stitching/detail/autocalib.hpp"
8 #include "opencv2/stitching/detail/blenders.hpp"
9 #include "opencv2/stitching/detail/camera.hpp"
10 #include "opencv2/stitching/detail/exposure_compensate.hpp"
11 #include "opencv2/stitching/detail/matchers.hpp"
12 #include "opencv2/stitching/detail/motion_estimators.hpp"
13 #include "opencv2/stitching/detail/seam_finders.hpp"
14 #include "opencv2/stitching/detail/util.hpp"
15 #include "opencv2/stitching/detail/warpers.hpp"
16 #include "opencv2/stitching/warpers.hpp"
17 #include <opencv2/stitching/stitcher.hpp>
18 #include<time.h>
19 using namespace std;
20 using namespace cv;
21 using namespace cv::detail;
22 //定义参数
23
24 bool try_use_gpu = false;
25 vector<Mat> imgs;
26 string result_name = "result.jpg";
27
28 int main()
29 {
30 Mat img = imread("1.jpg");
31 imgs.push_back(img);
32 img = imread("2.jpg");
33 imgs.push_back(img);
34
35 Mat pano;
36 Stitcher stitcher = Stitcher::createDefault(try_use_gpu);
37 Stitcher::Status status = stitcher.stitch(imgs, pano);
38
39 if (status != Stitcher::OK)
40 {
41 cout << "Can‘t stitch images, error code = " << int(status) << endl;
42 return -1;
43 }
44
45 imwrite(result_name, pano);
46 return 0;
47 system("pause");
48 return 0;
49 }
傻瓜式的,无法改写的设置。
然后改成另外一个可以改写的版本:
1 #include "stdafx.h"
2 #include <iostream>
3 #include <fstream>
4 #include <string>
5 #include "opencv2/opencv_modules.hpp"
6 #include "opencv2/highgui/highgui.hpp"
7 #include "opencv2/stitching/detail/autocalib.hpp"
8 #include "opencv2/stitching/detail/blenders.hpp"
9 #include "opencv2/stitching/detail/camera.hpp"
10 #include "opencv2/stitching/detail/exposure_compensate.hpp"
11 #include "opencv2/stitching/detail/matchers.hpp"
12 #include "opencv2/stitching/detail/motion_estimators.hpp"
13 #include "opencv2/stitching/detail/seam_finders.hpp"
14 #include "opencv2/stitching/detail/util.hpp"
15 #include <opencv2/stitching/warpers.hpp>
16 #include <opencv2/stitching/stitcher.hpp>
17 #include<time.h>
18 using namespace std;
19 using namespace cv;
20 using namespace cv::detail;
21 //定义参数
22
23 bool try_use_gpu = false;
24 vector<Mat> imgs;
25 string result_name = "result.jpg";
26
27 int main()
28 {
29 clock_t start, finish;
30 double totaltime;
31 start = clock();
32 int filenum = 2;
33 char* fdir[] = { "1.jpg", "2.jpg", "3.jpg", "4.jpg", "5.jpg"};
34 Mat img, pano;
35 for (int i = 0; i < filenum; i++){
36 img = imread(fdir[i]);
37 imgs.push_back(img);
38 }
39 Stitcher stitcher = Stitcher::createDefault(try_use_gpu);
40 stitcher.setRegistrationResol(0.6);//为了加速,我选0.1,默认是0.6,最大值1最慢,此方法用于特征点检测阶段,如果找不到特征点,调高吧
41 //stitcher.setSeamEstimationResol(0.1);//默认是0.1
42 //stitcher.setCompositingResol(-1);//默认是-1,用于特征点检测阶段,找不到特征点的话,改-1
43 stitcher.setPanoConfidenceThresh(1);//默认是1,见过有设0.6和0.4的
44 stitcher.setWaveCorrection(false);//默认是true,为加速选false,表示跳过WaveCorrection步骤
45 //stitcher.setWaveCorrectKind(detail::WAVE_CORRECT_HORIZ);//还可以选detail::WAVE_CORRECT_VERT ,波段修正(wave correction)功能(水平方向/垂直方向修正)。因为setWaveCorrection设的false,此语句没用
46
47 //找特征点surf算法,此算法计算量大,但对刚体运动、缩放、环境影响等情况下较为稳定
48 detail::SurfFeaturesFinder *featureFinder = new detail::SurfFeaturesFinder();
49 stitcher.setFeaturesFinder(featureFinder);
50
51 //找特征点ORB算法,但是发现草地这组图,这个算法不能完成拼接
52 //detail::OrbFeaturesFinder *featureFinder = new detail::OrbFeaturesFinder();
53 //stitcher.setFeaturesFinder(featureFinder);
54
55 //Features matcher which finds two best matches for each feature and leaves the best one only if the ratio between descriptor distances is greater than the threshold match_conf.
56 detail::BestOf2NearestMatcher *matcher = new detail::BestOf2NearestMatcher(false, 0.5f/*=match_conf默认是0.65,我选0.8,选太大了就没特征点啦,0.8都失败了*/);
57 stitcher.setFeaturesMatcher(matcher);
58
59 // Rotation Estimation,It takes features of all images, pairwise matches between all images and estimates rotations of all cameras.
60 //Implementation of the camera parameters refinement algorithm which minimizes sum of the distances between the rays passing through the camera center and a feature,这个耗时短
61 stitcher.setBundleAdjuster(new detail::BundleAdjusterRay());
62 //Implementation of the camera parameters refinement algorithm which minimizes sum of the reprojection error squares.
63 //stitcher.setBundleAdjuster(new detail::BundleAdjusterReproj());
64
65 //Seam Estimation
66 //Minimum graph cut-based seam estimator
67 //stitcher.setSeamFinder(new detail::GraphCutSeamFinder(detail::GraphCutSeamFinderBase::COST_COLOR));//默认就是这个
68 //stitcher.setSeamFinder(new detail::GraphCutSeamFinder(detail::GraphCutSeamFinderBase::COST_COLOR_GRAD));//GraphCutSeamFinder的第二种形式
69 //啥SeamFinder也不用,Stub seam estimator which does nothing.
70 stitcher.setSeamFinder(new detail::NoSeamFinder);
71 //Voronoi diagram-based seam estimator.
72 //stitcher.setSeamFinder(new detail::VoronoiSeamFinder);
73
74 //exposure compensators曝光补偿
75 //stitcher.setExposureCompensator(new detail::BlocksGainCompensator());//默认的就是这个
76 //不要曝光补偿
77 stitcher.setExposureCompensator(new detail::NoExposureCompensator());
78 //Exposure compensator which tries to remove exposure related artifacts by adjusting image intensities
79 //stitcher.setExposureCompensator(new detail::detail::GainCompensator());
80 //Exposure compensator which tries to remove exposure related artifacts by adjusting image block intensities
81 //stitcher.setExposureCompensator(new detail::detail::BlocksGainCompensator());
82
83 //Image Blenders
84 //Blender which uses multi-band blending algorithm
85 stitcher.setBlender(new detail::MultiBandBlender(try_use_gpu));//默认的是这个
86 //Simple blender which mixes images at its borders
87 //stitcher.setBlender(new detail::FeatherBlender());//这个简单,耗时少
88
89 //柱面?球面OR平面?默认为球面
90 //PlaneWarper* cw = new PlaneWarper();
91 //SphericalWarper* cw = new SphericalWarper();
92 //CylindricalWarper* cw = new CylindricalWarper();
93 //stitcher.setWarper(cw);
94
95 Stitcher::Status status = stitcher.estimateTransform(imgs);
96 if (status != Stitcher::OK)
97 {
98 cout << "Can‘t stitch images, error code = " << int(status) << endl;
99 return -1;
100 }
101 status = stitcher.composePanorama(pano);
102 if (status != Stitcher::OK)
103 {
104 cout << "Can‘t stitch images, error code = " << int(status) << endl;
105 return -1;
106 }
107 cout << "程序开始";
108 imwrite(result_name, pano);
109 finish = clock();
110 totaltime = (double)(finish - start) / CLOCKS_PER_SEC;
111 cout << "\n此程序的运行时间为" << totaltime << "秒!" << endl;
112 system("pause");
113 return 0;
114 }
可以设置一些,比如融合方式等。
但是我现在的问题是知道拼接量,怎么使用光照补偿 曝光补偿和多分辨率融合呢?
还有一种方法就是分解opencv stitch过程
#include "stdafx.h"
#include <iostream>
#include <fstream>
#include <string>
#include "opencv2/opencv_modules.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/stitching/detail/autocalib.hpp"
#include "opencv2/stitching/detail/blenders.hpp"
#include "opencv2/stitching/detail/camera.hpp"
#include "opencv2/stitching/detail/exposure_compensate.hpp"
#include "opencv2/stitching/detail/matchers.hpp"
#include "opencv2/stitching/detail/motion_estimators.hpp"
#include "opencv2/stitching/detail/seam_finders.hpp"
#include "opencv2/stitching/detail/util.hpp"
#include "opencv2/stitching/detail/warpers.hpp"
#include "opencv2/stitching/warpers.hpp"
#include<time.h>
using namespace std;
using namespace cv;
using namespace cv::detail;
//定义参数
vector<string> img_names; //图像名容器
bool try_gpu = false;
double work_megapix = 1;//图像匹配的分辨率大小,图像的面积尺寸变为work_megapix*100000
double seam_megapix = 0.1;//拼接缝像素的大小
double compose_megapix = 0.6;//拼接分辨率
float conf_thresh = 1.f;//两幅图来自同一全景图的置信度
WaveCorrectKind wave_correct = detail::WAVE_CORRECT_HORIZ;//波形校验,水平
int expos_comp_type = ExposureCompensator::GAIN_BLOCKS;//光照补偿方法,默认是gain_blocks
float match_conf = 0.65f;//特征点检测置信等级,最近邻匹配距离与次近邻匹配距离的比值,surf默认为0.65
int blend_type = Blender::MULTI_BAND;//融合方法,默认是多频段融合
float blend_strength = 5;//融合强度,0 - 100.默认是5.
string result_name = "result.jpg";//输出图像的文件名
int main()
{
clock_t start, finish;
double totaltime;
start = clock();
int argc = 2;
char* argv[] = { "1.jpg", "2.jpg", "3.jpg", "4.jpg", "5.jpg", "6.jpg", "7.jpg"
};
for (int i = 0; i < argc; ++i)
img_names.push_back(argv[i]);
int num_images = static_cast<int>(img_names.size());
double work_scale = 1, seam_scale = 1, compose_scale = 1;
//特征点检测以及对图像进行预处理(尺寸缩放),然后计算每幅图形的特征点,以及特征点描述子
cout << "Finding features..." << endl;
Ptr<FeaturesFinder> finder;
finder = new SurfFeaturesFinder();///采用Surf特征点检测
Mat full_img1, full_img, img;
vector<ImageFeatures> features(num_images);
vector<Mat> images(num_images);
vector<Size> full_img_sizes(num_images);
double seam_work_aspect = 1;
for (int i = 0; i < num_images; ++i)
{
full_img1 = imread(img_names[i]);
resize(full_img1, full_img, Size(full_img1.cols, full_img1.rows));
full_img_sizes[i] = full_img.size();
//计算work_scale,将图像resize到面积在work_megapix*10^6以下
work_scale = min(1.0, sqrt(work_megapix * 1e6 / full_img.size().area()));
resize(full_img, img, Size(), work_scale, work_scale);
//将图像resize到面积在work_megapix*10^6以下
seam_scale = min(1.0, sqrt(seam_megapix * 1e6 / full_img.size().area()));
seam_work_aspect = seam_scale / work_scale;
// 计算图像特征点,以及计算特征点描述子,并将img_idx设置为i
(*finder)(img, features[i]);
features[i].img_idx = i;
cout << "Features in image #" << i + 1 << ": " << features[i].keypoints.size() << endl;
//将源图像resize到seam_megapix*10^6,并存入image[]中
resize(full_img, img, Size(), seam_scale, seam_scale);
images[i] = img.clone();
}
finder->collectGarbage();
full_img.release();
img.release();
//对图像进行两两匹配
cout << "Pairwise matching" << endl;
//使用最近邻和次近邻匹配,对任意两幅图进行特征点匹配
vector<MatchesInfo> pairwise_matches;
BestOf2NearestMatcher matcher(try_gpu, match_conf);//最近邻和次近邻法
matcher(features, pairwise_matches); //对每两个图片进行匹配
matcher.collectGarbage();
//将置信度高于门限的所有匹配合并到一个集合中
///只留下确定是来自同一全景图的图片
vector<int> indices = leaveBiggestComponent(features, pairwise_matches, conf_thresh);
vector<Mat> img_subset;
vector<string> img_names_subset;
vector<Size> full_img_sizes_subset;
for (size_t i = 0; i < indices.size(); ++i)
{
img_names_subset.push_back(img_names[indices[i]]);
img_subset.push_back(images[indices[i]]);
full_img_sizes_subset.push_back(full_img_sizes[indices[i]]);
}
images = img_subset;
img_names = img_names_subset;
full_img_sizes = full_img_sizes_subset;
// 检查图片数量是否依旧满足要求
num_images = static_cast<int>(img_names.size());
if (num_images < 2)
{
cout << "Need more images" << endl;
return -1;
}
HomographyBasedEstimator estimator;//基于单应性的估计量
vector<CameraParams> cameras;//相机参数
estimator(features, pairwise_matches, cameras);
for (size_t i = 0; i < cameras.size(); ++i)
{
Mat R;
cameras[i].R.convertTo(R, CV_32F);
cameras[i].R = R;
cout << "Initial intrinsics #" << indices[i] + 1 << ":\n" << cameras[i].K() << endl;
}
Ptr<detail::BundleAdjusterBase> adjuster;//光束调整器参数
adjuster = new detail::BundleAdjusterRay();//使用Bundle Adjustment(光束法平差)方法对所有图片进行相机参数校正
adjuster->setConfThresh(conf_thresh);//设置配置阈值
Mat_<uchar> refine_mask = Mat::zeros(3, 3, CV_8U);
refine_mask(0, 0) = 1;
refine_mask(0, 1) = 1;
refine_mask(0, 2) = 1;
refine_mask(1, 1) = 1;
refine_mask(1, 2) = 1;
adjuster->setRefinementMask(refine_mask);
(*adjuster)(features, pairwise_matches, cameras);//进行矫正
// 求出的焦距取中值和所有图片的焦距并构建camera参数,将矩阵写入camera
vector<double> focals;
for (size_t i = 0; i < cameras.size(); ++i)
{
cout << "Camera #" << indices[i] + 1 << ":\n" << cameras[i].K() << endl;
focals.push_back(cameras[i].focal);
}
sort(focals.begin(), focals.end());
float warped_image_scale;
if (focals.size() % 2 == 1)
warped_image_scale = static_cast<float>(focals[focals.size() / 2]);
else
warped_image_scale = static_cast<float>(focals[focals.size() / 2 - 1] + focals[focals.size() / 2]) * 0.5f;
///波形矫正
vector<Mat> rmats;
for (size_t i = 0; i < cameras.size(); ++i)
rmats.push_back(cameras[i].R);
waveCorrect(rmats, wave_correct);////波形矫正
for (size_t i = 0; i < cameras.size(); ++i)
cameras[i].R = rmats[i];
cout << "Warping images ... " << endl;
vector<Point> corners(num_images);//统一坐标后的顶点
vector<Mat> masks_warped(num_images);
vector<Mat> images_warped(num_images);
vector<Size> sizes(num_images);
vector<Mat> masks(num_images);//融合掩码
// 准备图像融合掩码
for (int i = 0; i < num_images; ++i)
{
masks[i].create(images[i].size(), CV_8U);
masks[i].setTo(Scalar::all(255));
}
//弯曲图像和融合掩码
Ptr<WarperCreator> warper_creator;
warper_creator = new cv::SphericalWarper();
Ptr<RotationWarper> warper = warper_creator->create(static_cast<float>(warped_image_scale * seam_work_aspect));
for (int i = 0; i < num_images; ++i)
{
Mat_<float> K;
cameras[i].K().convertTo(K, CV_32F);
float swa = (float)seam_work_aspect;
K(0, 0) *= swa; K(0, 2) *= swa;
K(1, 1) *= swa; K(1, 2) *= swa;
corners[i] = warper->warp(images[i], K, cameras[i].R, INTER_LINEAR, BORDER_REFLECT, images_warped[i]);//计算统一后坐标顶点
sizes[i] = images_warped[i].size();
warper->warp(masks[i], K, cameras[i].R, INTER_NEAREST, BORDER_CONSTANT, masks_warped[i]);//弯曲当前图像
}
vector<Mat> images_warped_f(num_images);
for (int i = 0; i < num_images; ++i)
images_warped[i].convertTo(images_warped_f[i], CV_32F);
Ptr<ExposureCompensator> compensator = ExposureCompensator::createDefault(expos_comp_type);//建立补偿器以进行关照补偿,补偿方法是gain_blocks
compensator->feed(corners, images_warped, masks_warped);
//查找接缝
Ptr<SeamFinder> seam_finder;
seam_finder = new detail::GraphCutSeamFinder(GraphCutSeamFinderBase::COST_COLOR);
seam_finder->find(images_warped_f, corners, masks_warped);
//namedWindow("images_warped", 0);
//imshow("images_warped", images_warped[0]);
//namedWindow("masks_warped", 0);
//imshow("masks_warped", masks_warped[0]);
// 释放未使用的内存
images.clear();
images_warped.clear();
images_warped_f.clear();
masks.clear();
//////图像融合
cout << "Compositing..." << endl;
Mat img_warped, img_warped_s;
Mat dilated_mask, seam_mask, mask, mask_warped;
Ptr<Blender> blender;
double compose_work_aspect = 1;
for (int img_idx = 0; img_idx < num_images; ++img_idx)
{
cout << "Compositing image #" << indices[img_idx] + 1 << endl;
//由于以前进行处理的图片都是以work_scale进行缩放的,所以图像的内参
//corner(统一坐标后的顶点),mask(融合的掩码)都需要重新计算
// 读取图像和做必要的调整
full_img1 = imread(img_names[img_idx]);
resize(full_img1, full_img, Size(full_img1.cols, full_img1.rows));
compose_scale = min(1.0, sqrt(compose_megapix * 1e6 / full_img.size().area()));
compose_work_aspect = compose_scale / work_scale;
// 更新弯曲图像比例
warped_image_scale *= static_cast<float>(compose_work_aspect);
warper = warper_creator->create(warped_image_scale);
// 更新corners和sizes
for (int i = 0; i < num_images; ++i)
{
// 更新相机以下特性
cameras[i].focal *= compose_work_aspect;
cameras[i].ppx *= compose_work_aspect;
cameras[i].ppy *= compose_work_aspect;
// 更新corners和sizes
Size sz = full_img_sizes[i];
if (std::abs(compose_scale - 1) > 1e-1)
{
sz.width = cvRound(full_img_sizes[i].width * compose_scale);
sz.height = cvRound(full_img_sizes[i].height * compose_scale);
}
Mat K;
cameras[i].K().convertTo(K, CV_32F);
Rect roi = warper->warpRoi(sz, K, cameras[i].R);
corners[i] = roi.tl();
sizes[i] = roi.size();
}
if (abs(compose_scale - 1) > 1e-1)
resize(full_img, img, Size(), compose_scale, compose_scale);
else
img = full_img;
full_img.release();
Size img_size = img.size();
Mat K;
cameras[img_idx].K().convertTo(K, CV_32F);
// 扭曲当前图像
warper->warp(img, K, cameras[img_idx].R, INTER_LINEAR, BORDER_REFLECT, img_warped);
// 扭曲当前图像掩模
mask.create(img_size, CV_8U);
mask.setTo(Scalar::all(255));
warper->warp(mask, K, cameras[img_idx].R, INTER_NEAREST, BORDER_CONSTANT, mask_warped);
// 曝光补偿
compensator->apply(img_idx, corners[img_idx], img_warped, mask_warped);
img_warped.convertTo(img_warped_s, CV_16S);
img_warped.release();
img.release();
mask.release();
dilate(masks_warped[img_idx], dilated_mask, Mat());
resize(dilated_mask, seam_mask, mask_warped.size());
mask_warped = seam_mask & mask_warped;
//初始化blender
if (blender.empty())
{
blender = Blender::createDefault(blend_type, try_gpu);
Size dst_sz = resultRoi(corners, sizes).size();
float blend_width = sqrt(static_cast<float>(dst_sz.area())) * blend_strength / 100.f;
if (blend_width < 1.f)
blender = Blender::createDefault(Blender::NO, try_gpu);
else
{
MultiBandBlender* mb = dynamic_cast<MultiBandBlender*>(static_cast<Blender*>(blender));
mb->setNumBands(static_cast<int>(ceil(log(blend_width) / log(2.)) - 1.));
cout << "Multi-band blender, number of bands: " << mb->numBands() << endl;
}
//根据corners顶点和图像的大小确定最终全景图的尺寸
blender->prepare(corners, sizes);
}
// // 融合当前图像
blender->feed(img_warped_s, mask_warped, corners[img_idx]);
//blender->feed(img, mask, corners[img_idx]);
}
Mat result, result_mask;
blender->blend(result, result_mask);
imwrite(result_name, result);
namedWindow("result", 0);
imshow("result", result);
finish = clock();
totaltime = (double)(finish - start) / CLOCKS_PER_SEC;
cout << "\n此程序的运行时间为" << totaltime << "秒!" << endl;
waitKey(0);
system("pause");
return 0;
waitKey(0);
system("pause");
return 0;
}
上面的方法现在存在两个问题:
1 conner 左上角的点是怎么获得的?
2 有了左上角的点,用图割方法获得最佳分割线,然后调用拉普拉斯金字塔能否实现完美拼接。
标签:图片 曝光 tga simple main error ace imshow details
原文地址:http://www.cnblogs.com/stevendes1/p/6725887.html