标签:park 编码 omega src 空间 img 网络 alt 方法
FOC原理框图如下:
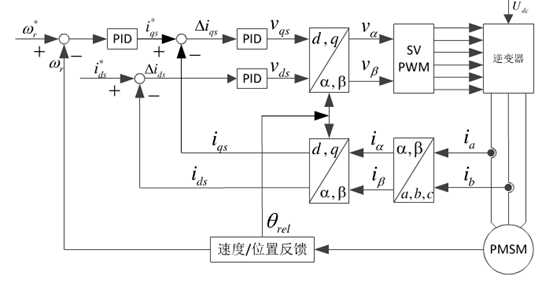
其中涉及到两种坐标转换:
1. Clark变换:常规的三相坐标系→静止的二相坐标系α、β
正变换矩阵
$\left[ {\begin{array}{*{20}{c}}
{\sqrt {\frac{2}{3}} }&{\frac{{ - 1}}{2}\sqrt {\frac{2}{3}} }&{\frac{{{\rm{ - }}1}}{2}\sqrt {\frac{2}{3}} }\\
0&{\frac{{\sqrt 2 }}{2}}&{\frac{{{\rm{ - }}\sqrt 2 }}{2}}\\
{\frac{1}{{\sqrt 3 }}}&{\frac{1}{{\sqrt 3 }}}&{\frac{1}{{\sqrt 3 }}}
\end{array}} \right]$
逆变换矩阵
$\left[ {\begin{array}{*{20}{c}}
{\sqrt {\frac{2}{3}} }&0&{\frac{1}{{\sqrt 3 }}}\\
{\frac{{{\rm{ - }}1}}{{\sqrt 3 }}}&{\frac{{\sqrt 2 }}{2}}&{\frac{1}{{\sqrt 3 }}}\\
{\frac{{{\rm{ - }}1}}{{\sqrt 3 }}}&{\frac{{{\rm{ - }}\sqrt 2 }}{2}}&{\frac{1}{{\sqrt 3 }}}
\end{array}} \right]$
2. Park变换:二相静止坐标系α、β→二相旋转坐标系d、q
正变换矩阵
$\left[ {\begin{array}{*{20}{c}}
{{\rm{cos}}\theta }&{\sin \theta }\\
{ - \sin \theta }&{\cos \theta }
\end{array}} \right]$
逆变换矩阵
$\left[ {\begin{array}{*{20}{c}}
{{\rm{cos}}\theta }&{ - \sin \theta }\\
{\sin \theta }&{\cos \theta }
\end{array}} \right]$
其中最关键的一步是确定转子位置和速度。FOC的应用可分为异步电机和永磁同步电机(PMSM):
1. 在异步电机的控制中,根据磁链观测方法的不同,FOC又可分为直接磁场定向控制和间接磁场定向控制。直接磁场定向控制通过磁场检测或者运算来确定转子磁链矢量的空间位置,方法简单,但受电机齿槽影响较大,检测信号有脉动,实际难以应用,通常通过一定计算估计磁链位置,因此又称为磁链观测法。间接磁场定向控制通过控制转差频率实现,计算方便。
磁链观测法有电流模型和电压模型,电流模型严重依赖于转子时间常数T,高速时,如果T存在偏差,会引起磁通震荡,因此电流模型适用于中低速;电压模型依赖于定子电阻R,R易受负载和温度的影响而变化,且低速时,电压检测困难,因此电压模型适用于中高速。实际中长结合两者使用。但因需要计算反正切,计算量较大。
为了减少计算量,更多使用间接观测法
${\omega _{\rm{s}}} = \frac{{{L_m}*{i_{sq}}}}{{{T_r}*{\psi _r}}} = \frac{{1 + {T_r}P}}{{{T_r}}}*\frac{{{i_{sq}}}}{{{i_{sd}}}}$
其中,
${\omega _{\rm{s}}}$为转差角频率;
${L_m}$为定子电感;
${T_r}$为转子时间常数,${T_r} = \frac{{{L_r}}}{{{R_r}}}$;
${\psi _r}$为转子磁链;
$P$为电机极对数;
${i_{sq}}$为转矩电流分量;
${i_{sd}}$为励磁电流分量;
${\theta _{\rm{e}}} = \int {\left( {{\omega _{\rm{r}}} + {\omega _{\rm{s}}}} \right)} {\rm{dt}} = \theta + \int {{\omega _{\rm{s}}}} {\rm{dt}}$
${\theta _{\rm{e}}}$即为磁链空间角度,${\omega _{\rm{r}}}$为电机角速度
2. 对于同步电机的FOC控制,有位置传感器的情况下,转子位置和速度可由HALL传感器或编码器得到;在无感情况下,通常用估算器法(滑模观测器(SMO)和PLL估算器)、MRAS法(模型参考自适应)、卡尔曼滤波法、高频注入法及神经网络等方法。
FOC的控制策略:id =0控制、最大转矩电流比控制、最大输出功率控制、弱磁控制等。
标签:park 编码 omega src 空间 img 网络 alt 方法
原文地址:http://www.cnblogs.com/yueze/p/7078486.html