标签:ges 初始化 打开 工业 logs image 不同的 函数 http
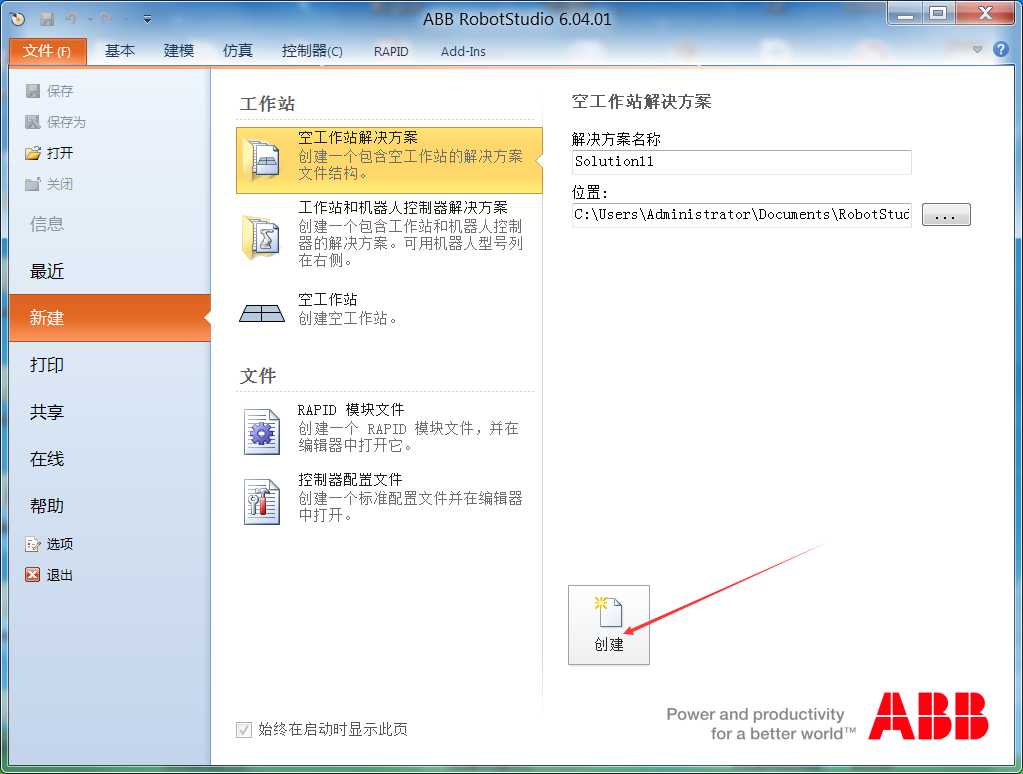
1.新建一个空的工作站
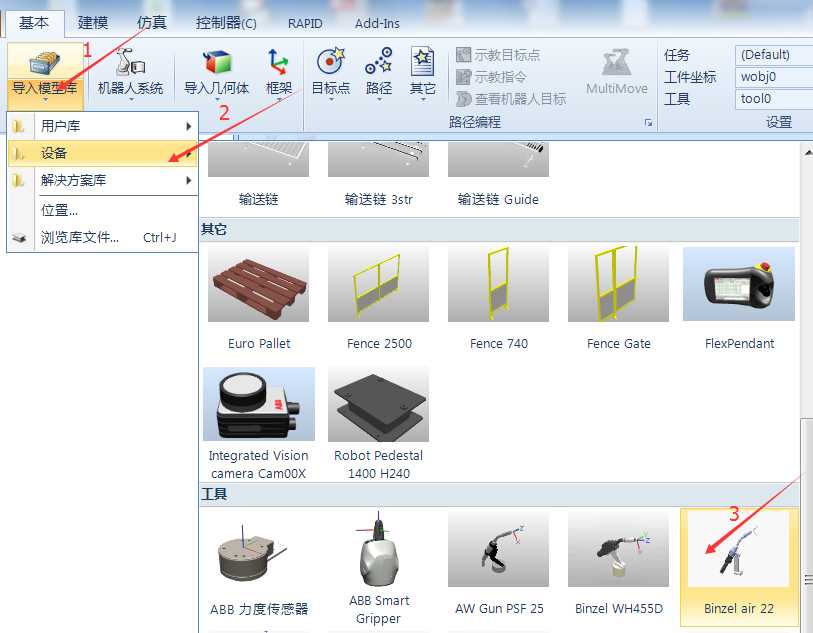
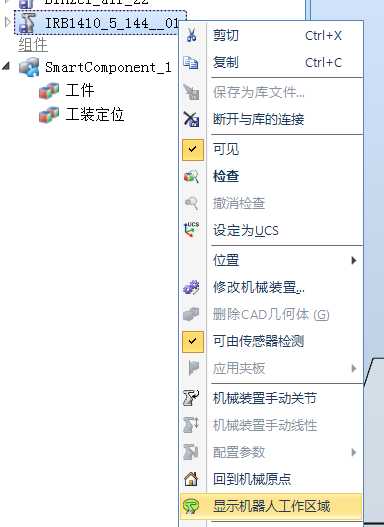
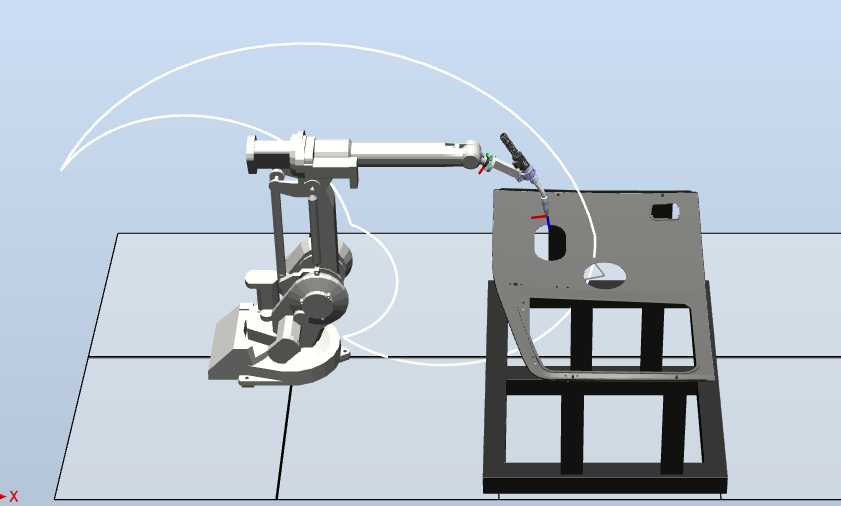
2.添加一个机器人和一个工具

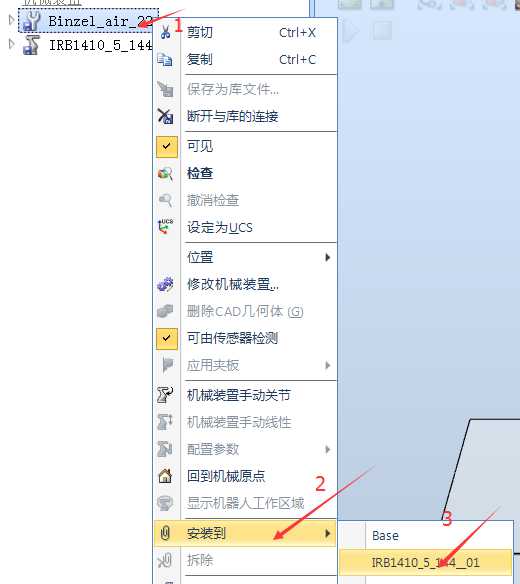
3.将工具安装到机器人上
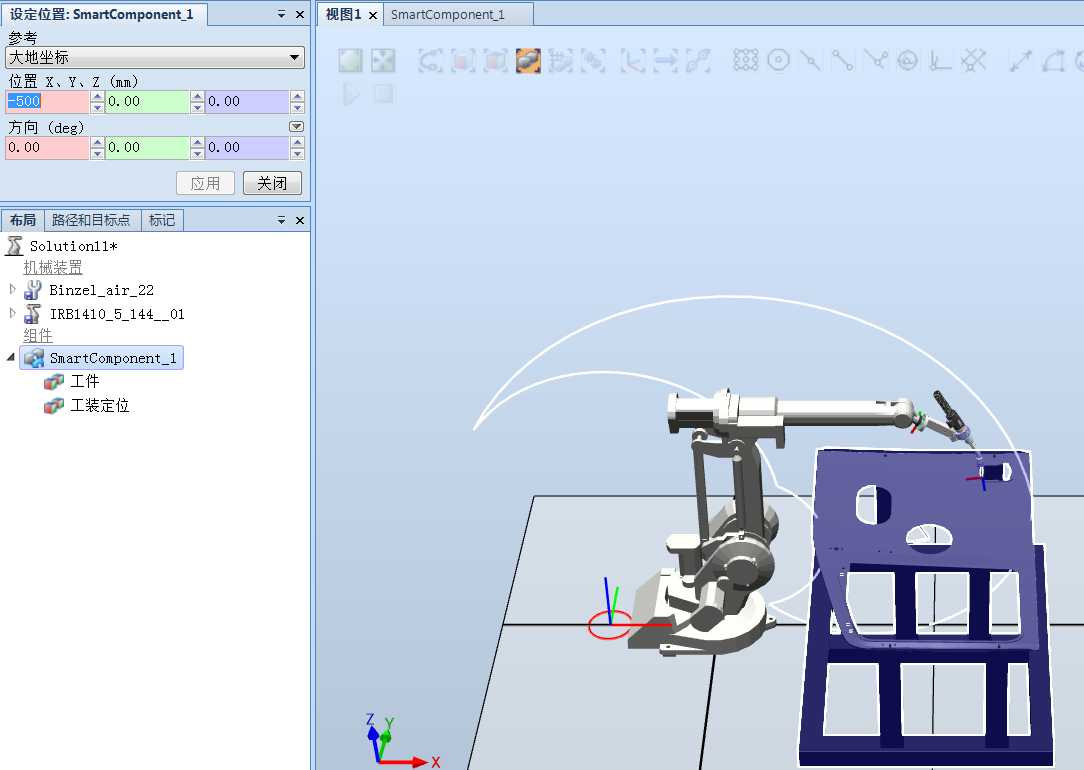
4.在添加一个工件
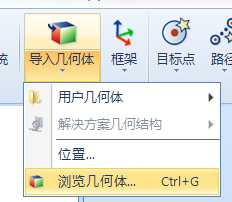

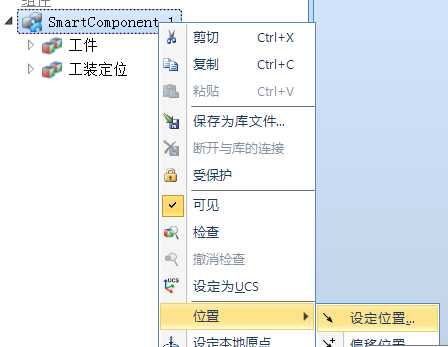
移动到合适的位置
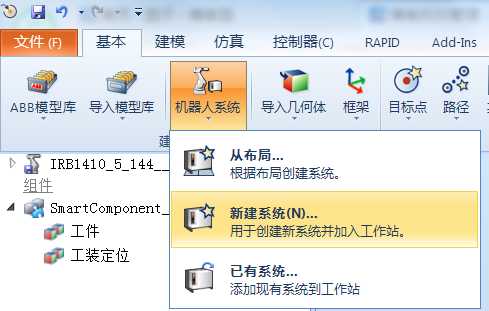
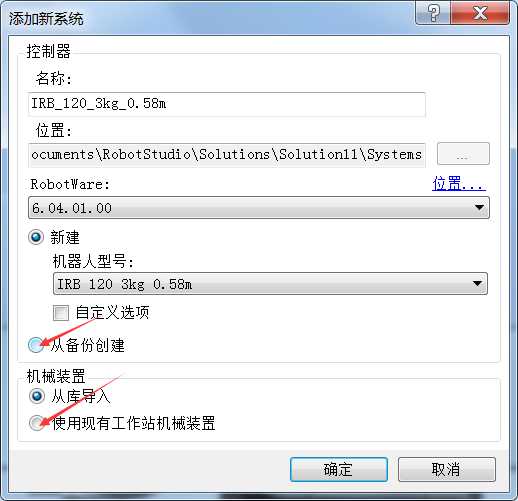
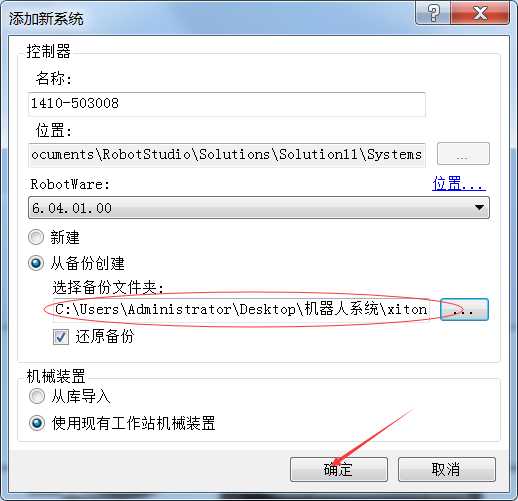
5.新建一个系统,将自己已有的系统添加进来。
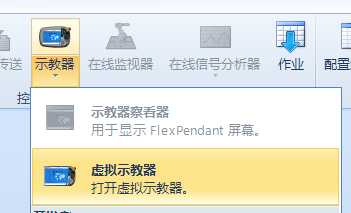
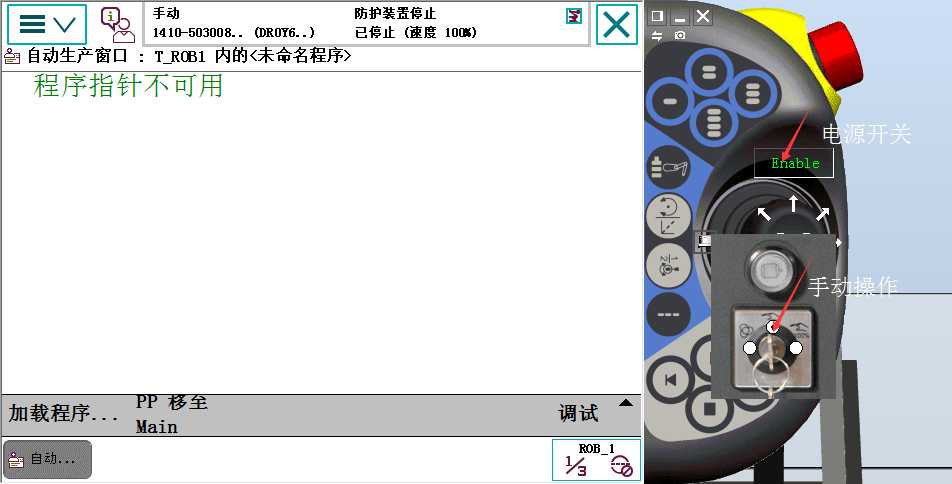
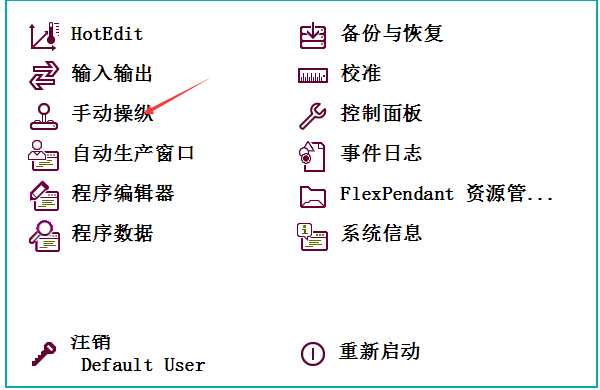
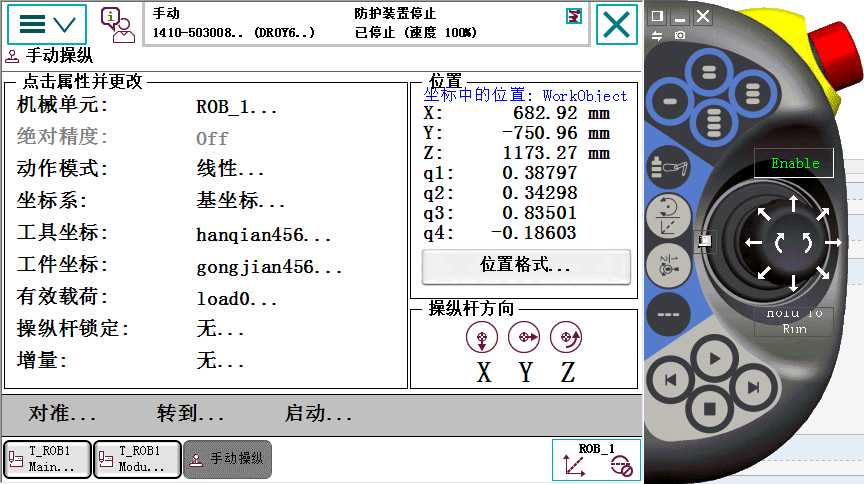
6.打开示教器
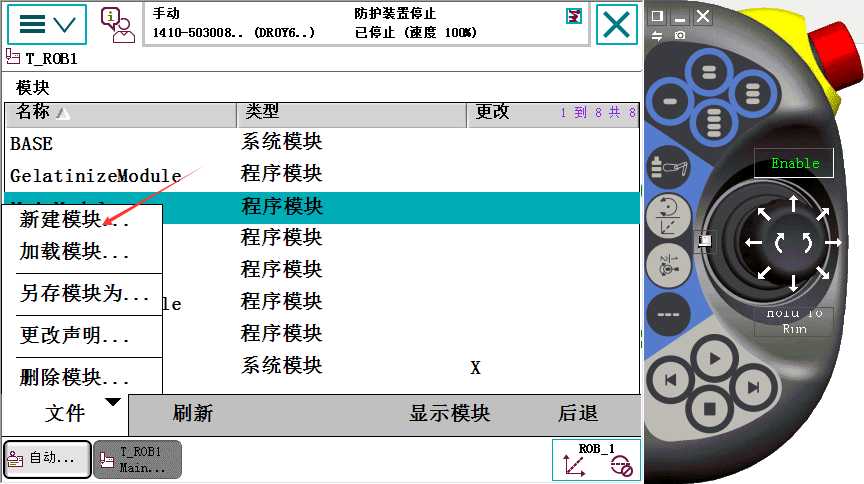
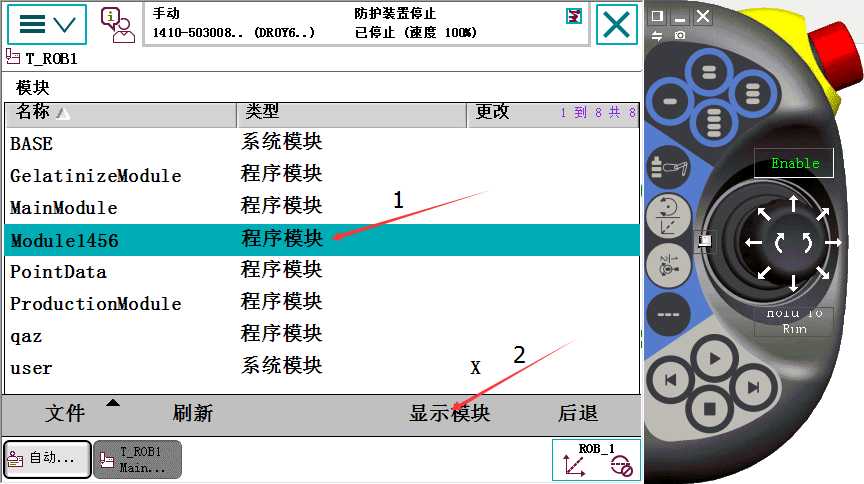
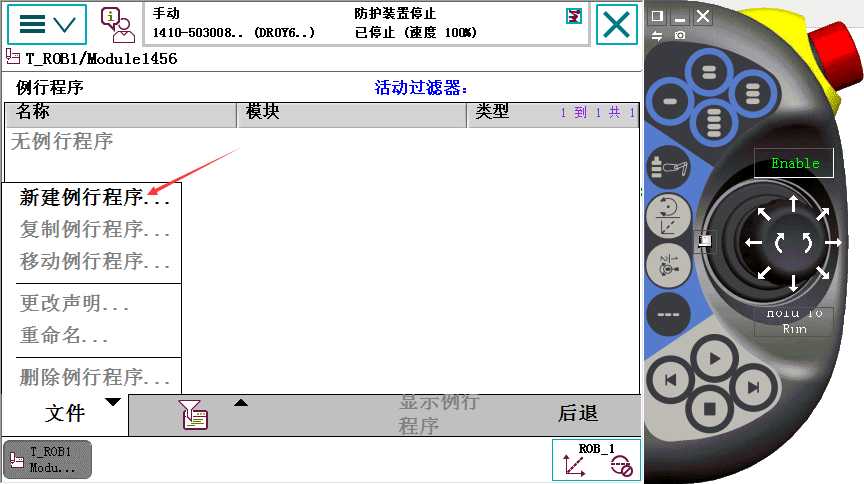
7.添加一个模块和四个例行程序(home点、初始化、主函数、路径)


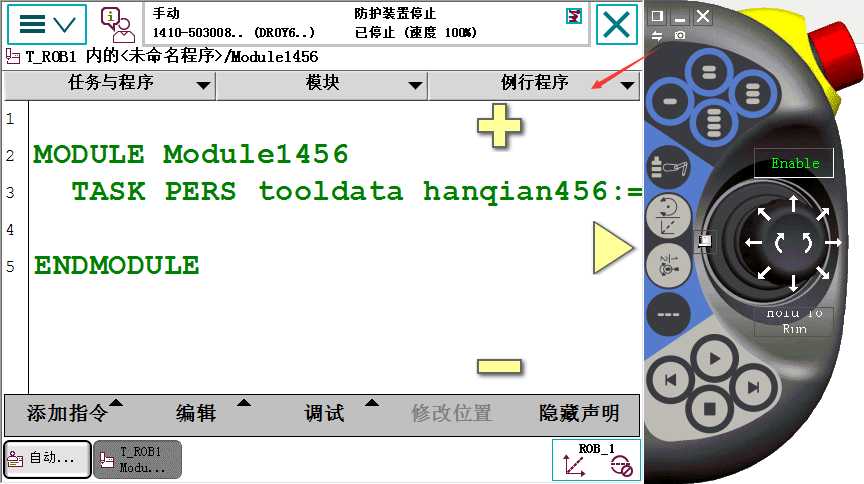

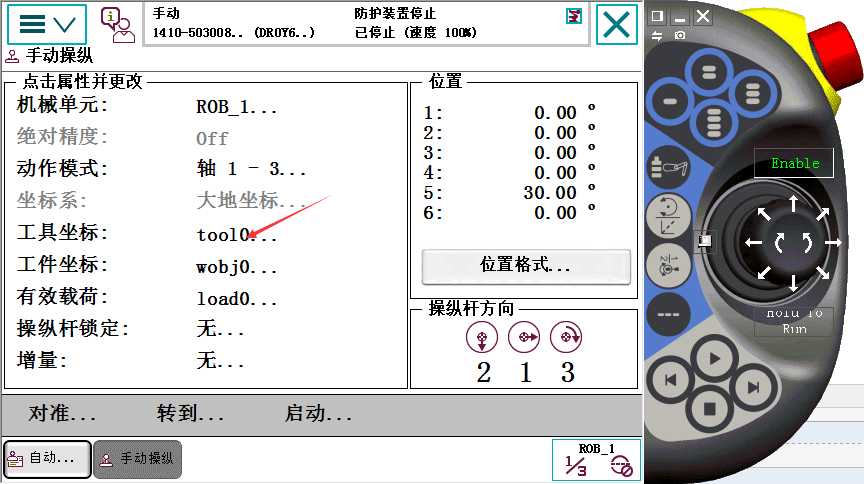
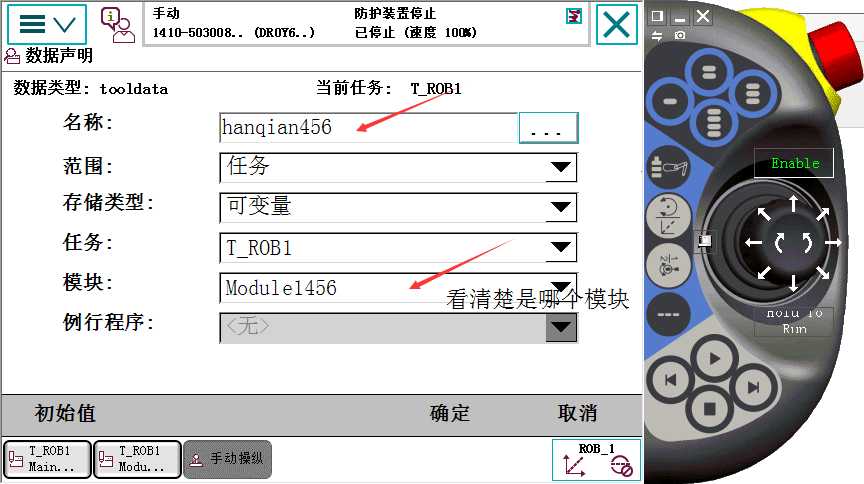
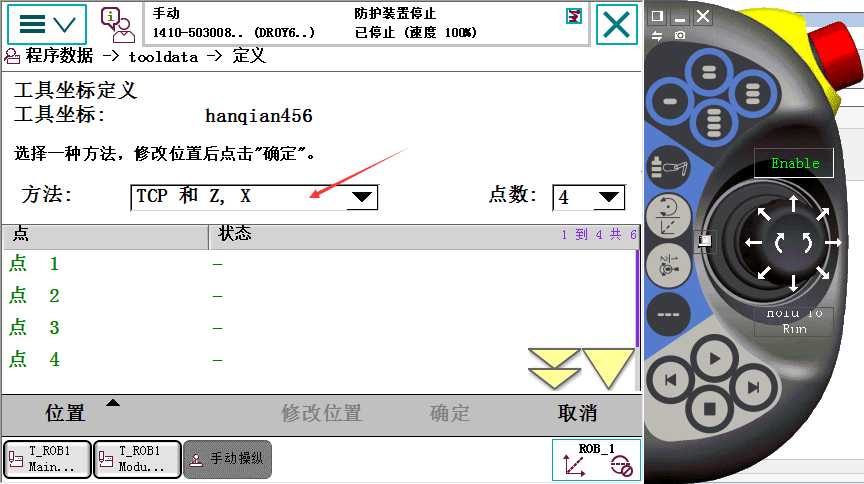
8.添加一个工具坐标和工件坐标在刚刚新建的模块里


同上建多一个工件坐标
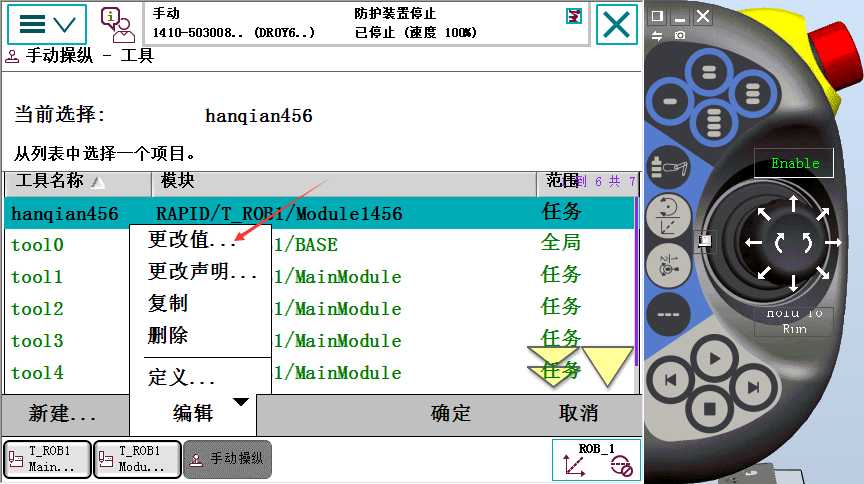
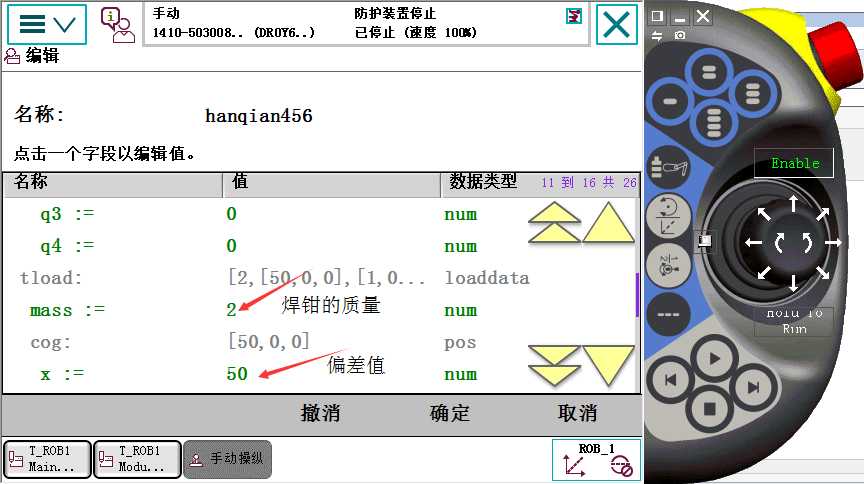
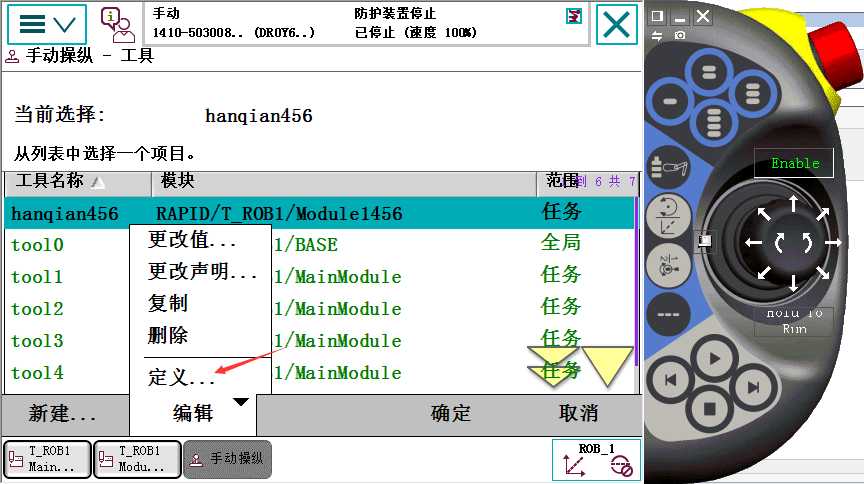
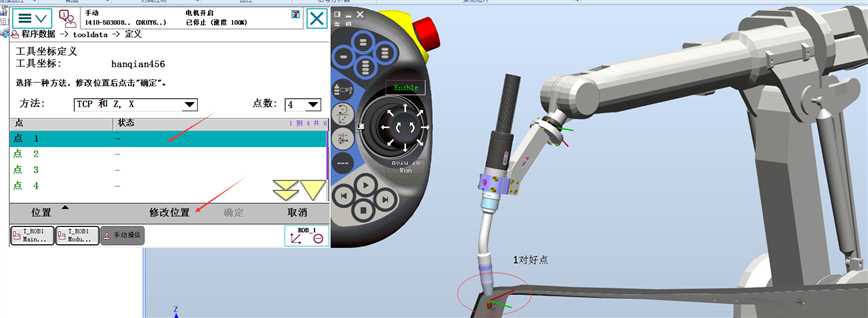
修改焊枪的更改值和定义
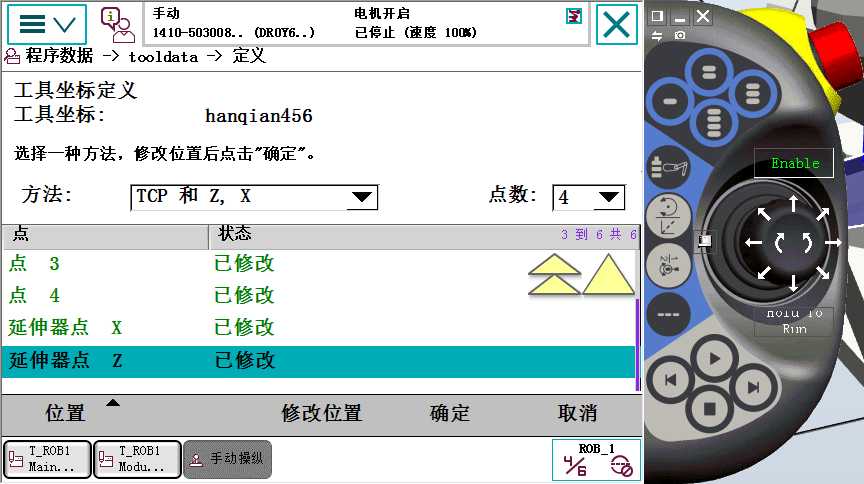
对准一个点,但是姿态不同的四个点(且第四个点要垂直)

同上

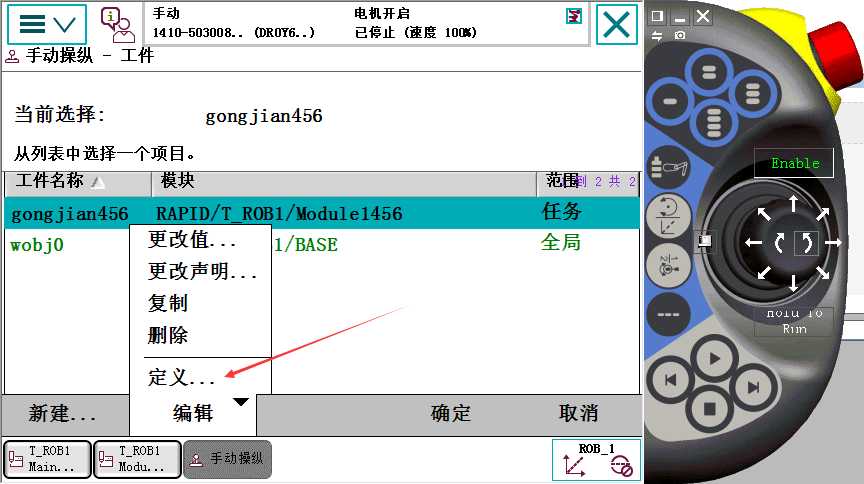
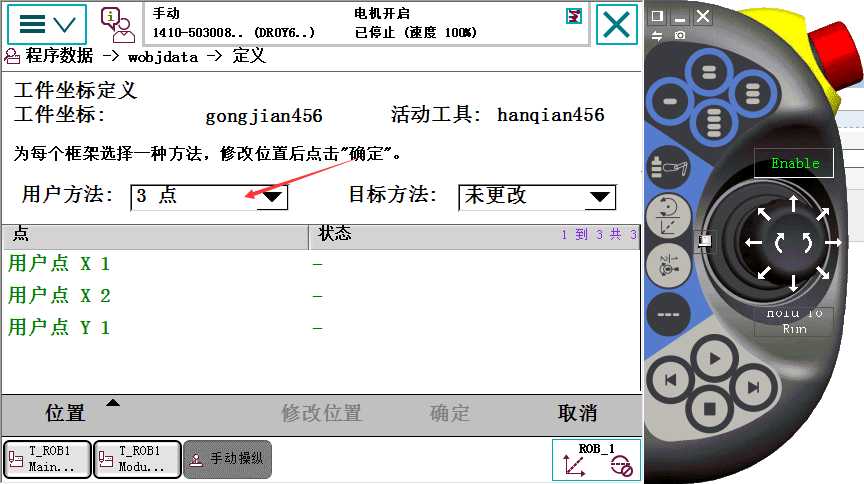
同上,定工件坐标的xyz就ok了
标签:ges 初始化 打开 工业 logs image 不同的 函数 http
原文地址:http://www.cnblogs.com/qqwq12/p/7112875.html