标签:info 互斥 数组 技术 RKE 保存 数据保存 回调 异步
---恢复内容开始---
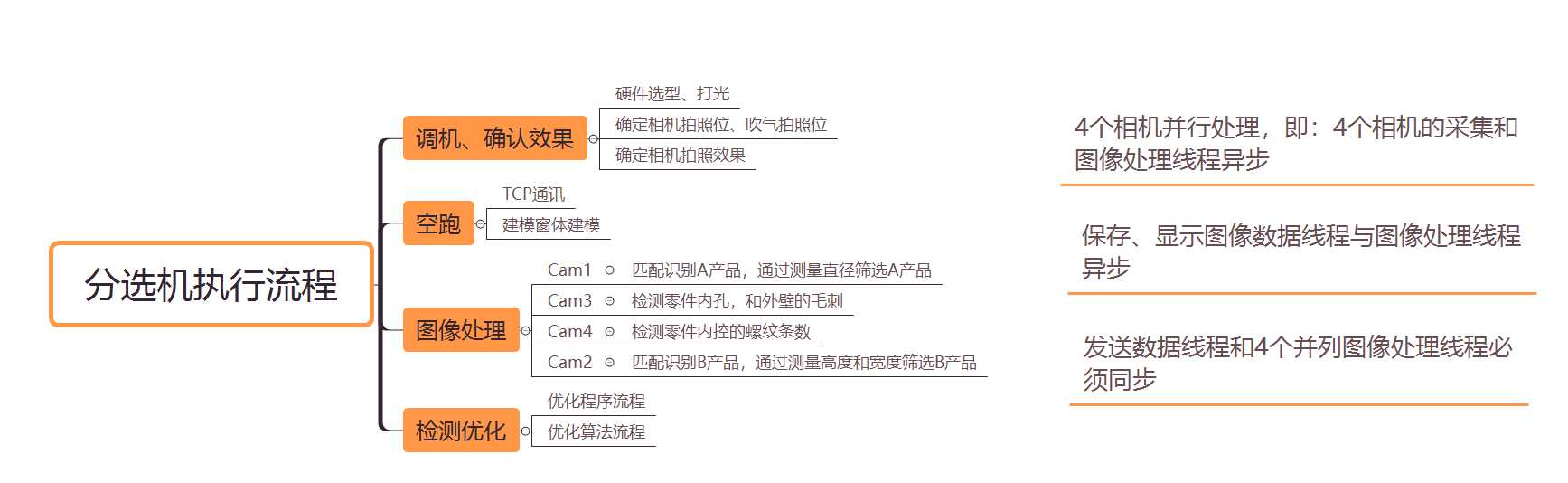
每个相机之间的间距大约在7000个脉冲左右。
若图像处理和数据发送使用线程异步实现,则为了保证数据不会乱,将图像/数据保存到队列或数组中,然后处理线程从队列或数组中取数据进行后续的操作。
实现同步的方法:标志位,监视线程,同步锁,互斥体等。
实现跨线程的方法:禁止跨线程访问;使用invoke/begininvoke;使用backgrondworker对象,调用工作线程函数实现;
相机在子界面及主界面上运行,如果采用每个界面都注册相机回调函数的方式,则
每次进入界面都要注册回调函数,在界面退出时,需要减绑回调函数;
---恢复内容结束---
标签:info 互斥 数组 技术 RKE 保存 数据保存 回调 异步
原文地址:https://www.cnblogs.com/jefy/p/9348226.html