标签:form har hud flight teams map cap ref round
q 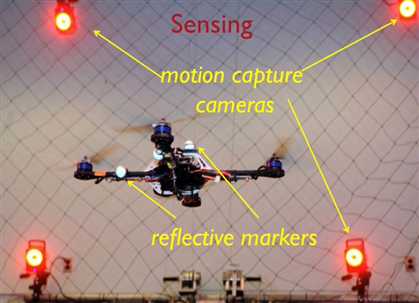
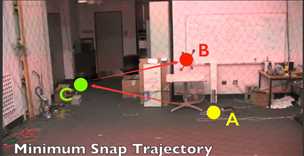
estimate position within several mm, and updates at 200Hz
Vicon Motion Capture system, please click on this link.
https://www.coursera.org/learn/robotics-flight/lecture/ZL921/supplementary-material-lab-introduction
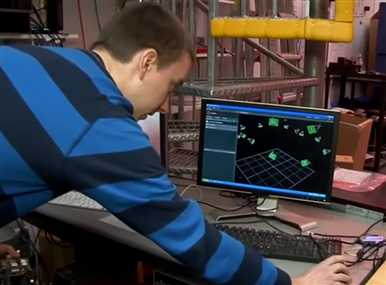

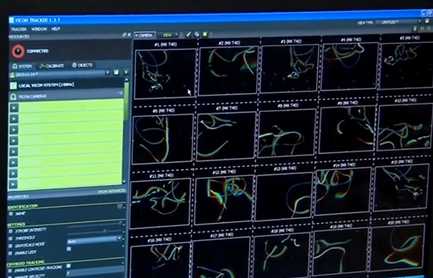
calibration


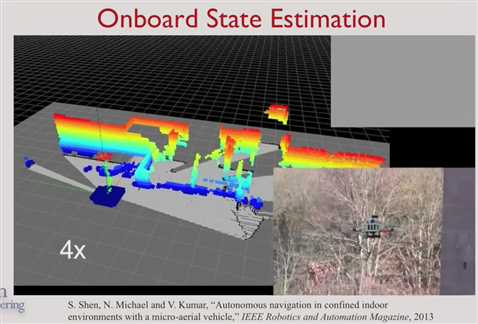
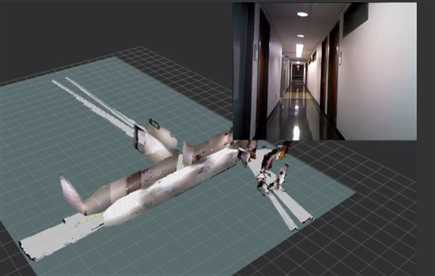
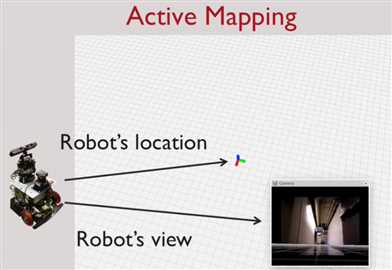
these are indoor estimation, but how about out door situations?



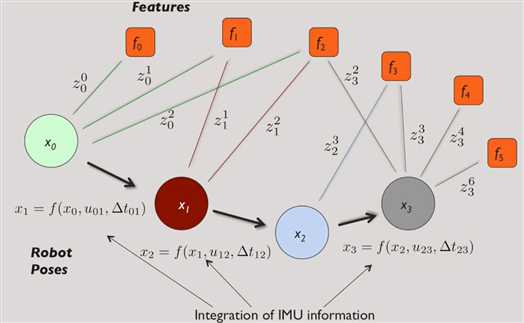
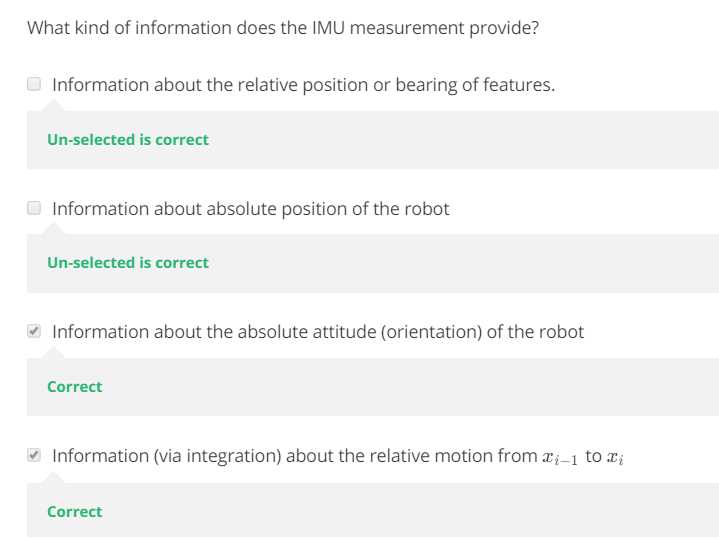
imu for the position transformation?
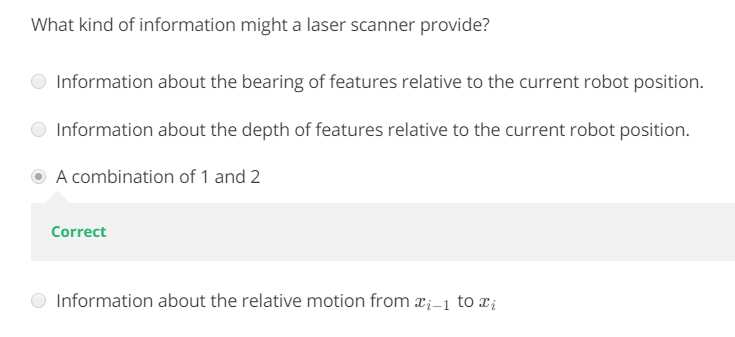
laser or camera for angle and distance measurement?

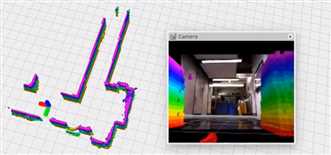
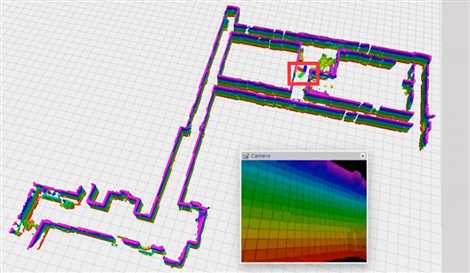
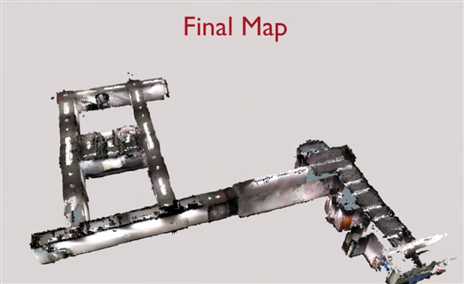
This is SLAM!!!!
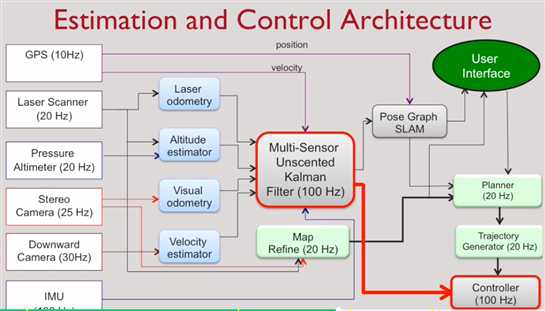
To learn more about how we use the Multi-Sensor Unscented Kalman Filter, and how we build 3-D maps, please see sections 5.2 and 3.3 of the following thesis:
https://d18ky98rnyall9.cloudfront.net/_442e88b97aa6aea46ee426a54c797700_shaojie_shen_thesis.pdf?Expires=1539648000&Signature=PxHn2SPu2b5W-y3qmWG330Op81sw-VjjEEZA~a2poV6WxBDq4WwhZILzCWMpCdr9UAHvFChhnMVW7foh~uUcubNow24RlshyzzwVheM4L-0yqVYo1-0knZevnqU0yYku1jzcEWQahuDfsjD8QiCJ-Dvzx0cMAA2Vfu2PCzVJFR8_&Key-Pair-Id=APKAJLTNE6QMUY6HBC5A



https://www.youtube.com/watch?v=mZhwK_y3a2Y
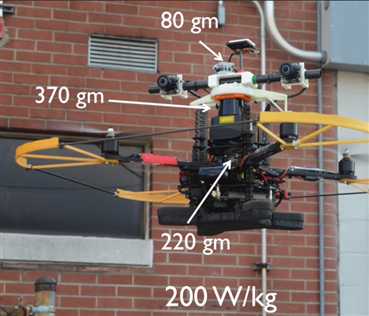
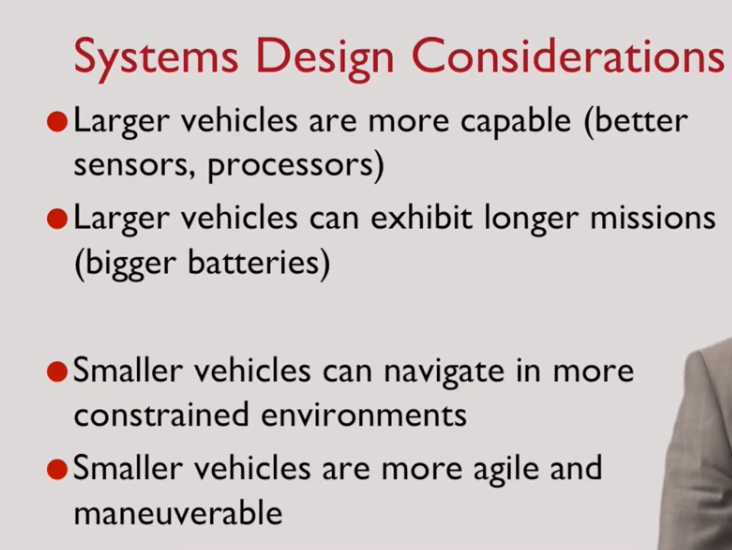
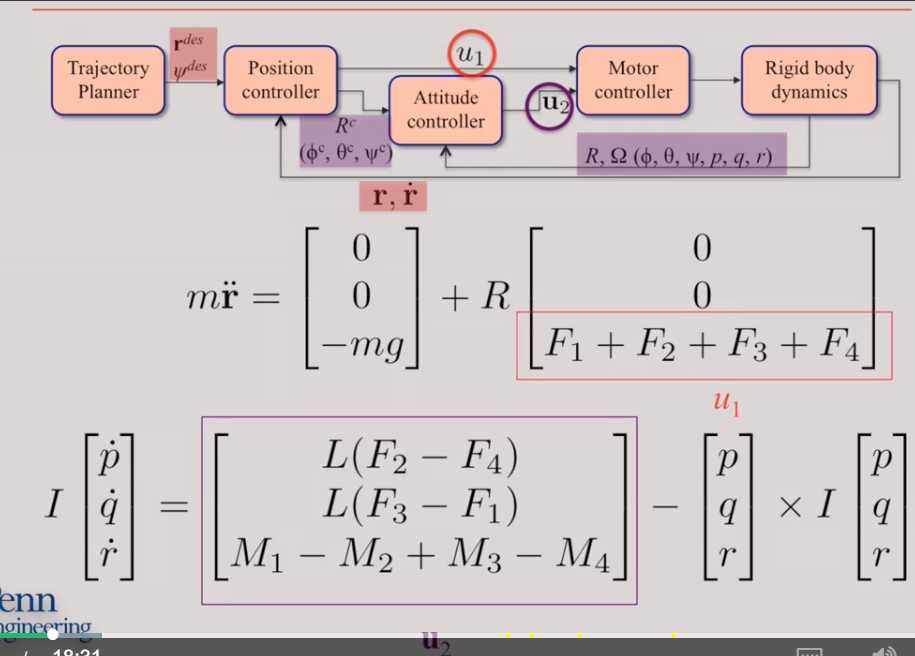
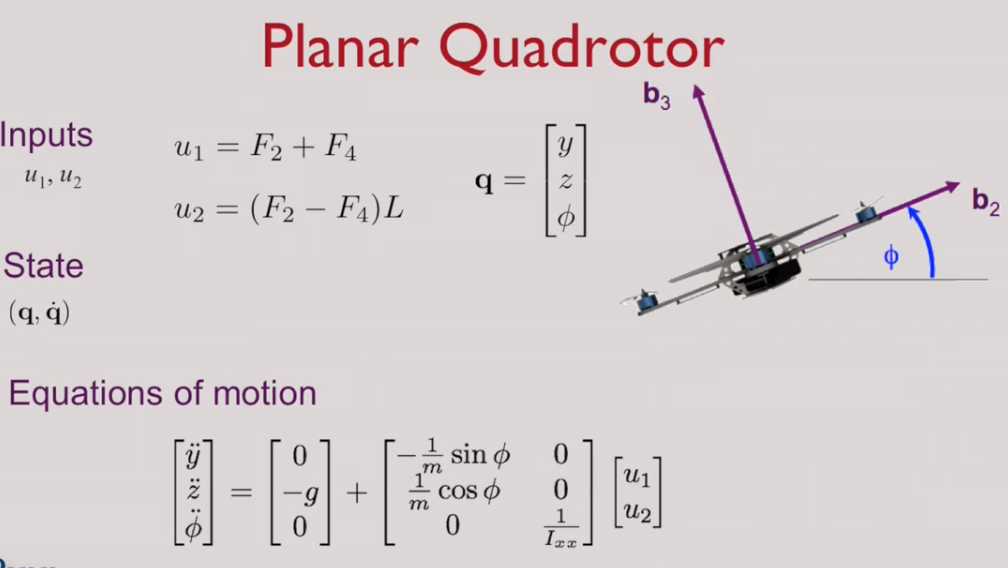
inertia is small

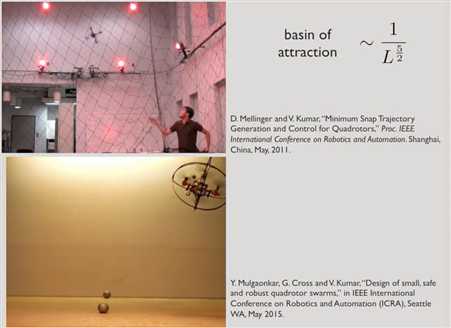
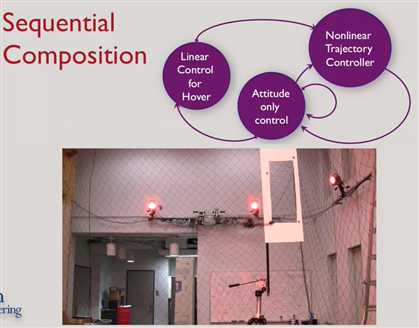
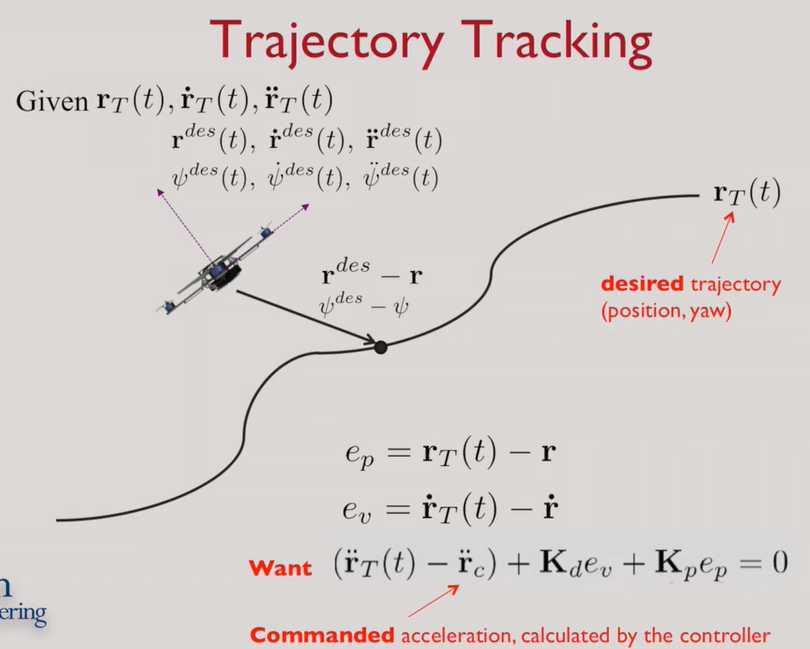
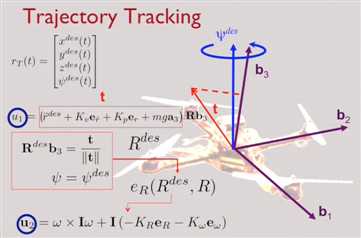
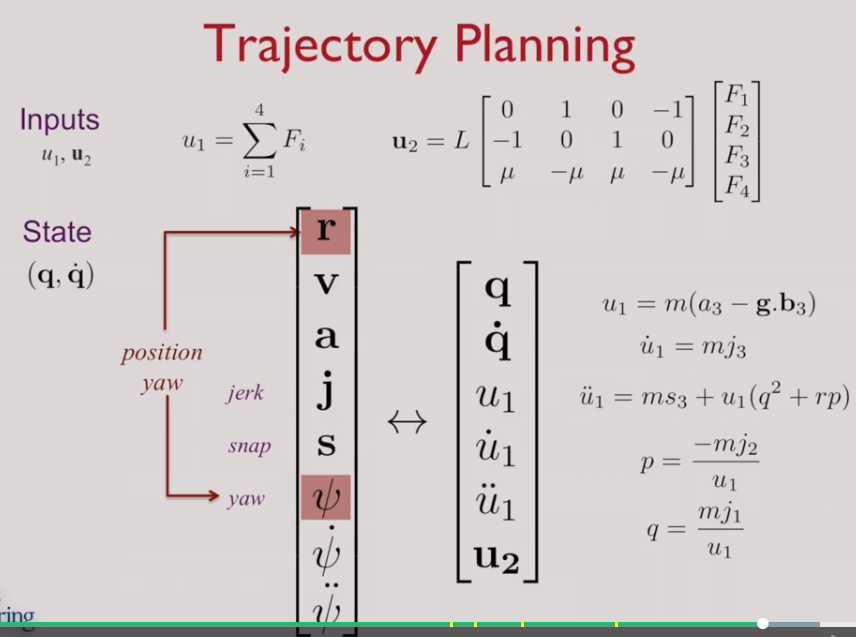
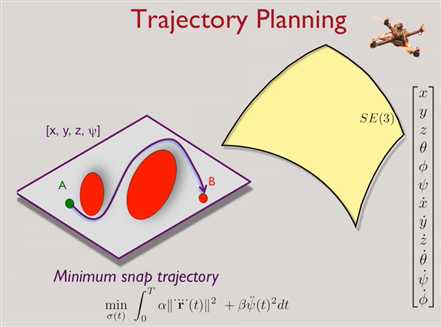
To learn more about how we use the nonlinear controller and how we plan three dimensional trajectories, please see the relevant chapters in the thesis below.
https://d18ky98rnyall9.cloudfront.net/_7f3305d57403df299005db44f23852a3_daniel_mellinger_thesis.pdf?Expires=1539648000&Signature=QyzmO7g0WIOVCxSe2sOVb5hW5x37drrLFTKtl~F8jSVCPQbXKrT2a~dOfcpY4NKYsNcsYKAiZA~LpE048YRhn~joPmrw4y1kGT8FtHzIAJIOAjjQNm7vdlkvCsgX-Vq-GirecX~4PQgErQuDNpZ2i-HHldWVWAys59ofFZoZMko_&Key-Pair-Id=APKAJLTNE6QMUY6HBC5A


3D printing????? by drones???





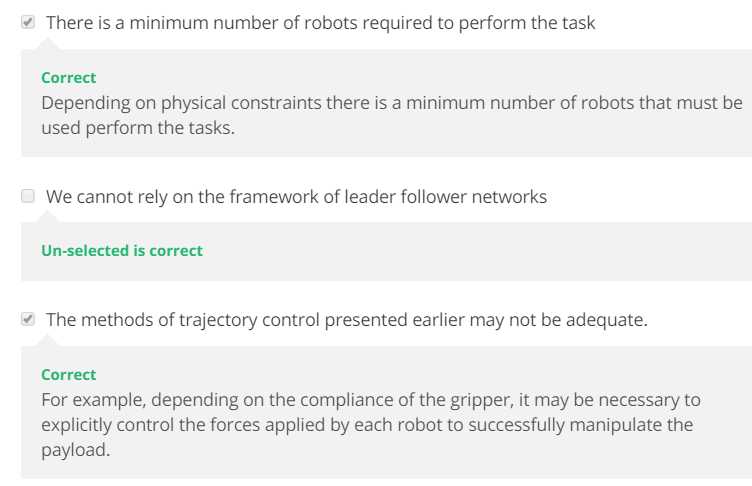
considering payloads
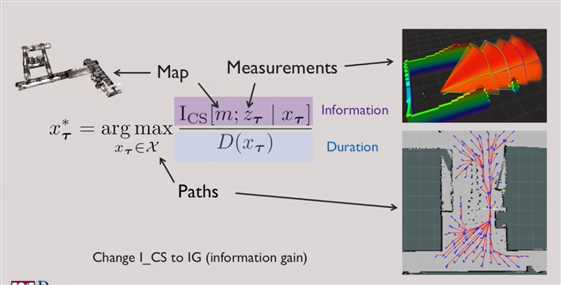




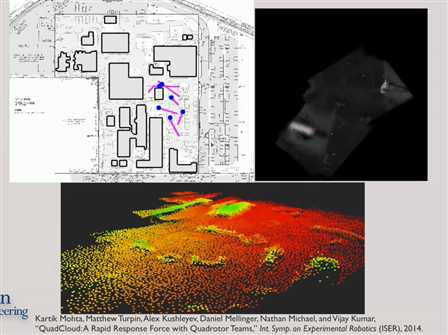
To learn more about collaborative mapping between aerial and ground robots, please refer to the doctoral thesis by Benjamin Charrow, Information-theoretic active perception for multi-robot teams:
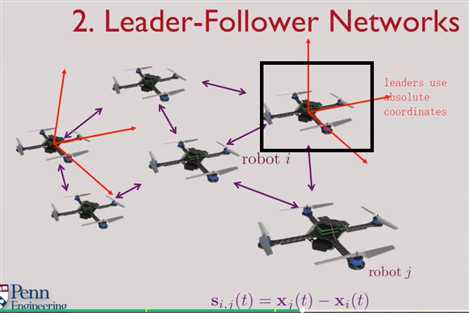
UPenn - Robotics 1:Aerial Robotics - week 4:Advanced Topics
标签:form har hud flight teams map cap ref round
原文地址:https://www.cnblogs.com/ecoflex/p/9789053.html