标签:com 严格 问题 算法 发送 text body RKE ima
在一个分布式计算系统中,为了保证数据的一致性需要对数据进行一致性快照。Flink和spark在做流失计算的时候都借鉴了chandy-lamport算法的原理,这篇文章就是对chandy-lamport算法原理的详细介绍。
考虑一个分布式计算系统。
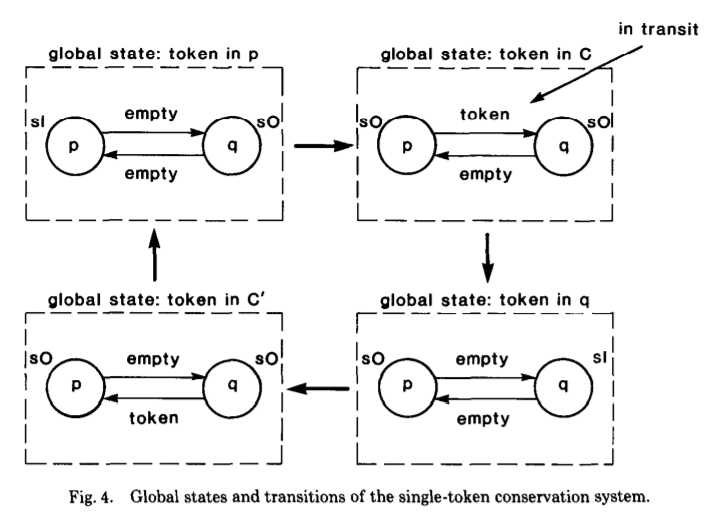
其中有两个节点,也就是两个进程,p和q,s0,s1对应的是两个状态。token是一个令牌,全局只有一个,进程之间互相发送令牌。s0对应的状态就是进程不持有令牌,s1对应的状态就是进程持有令牌。两个进程间的连线代表消息队列,token有可能处于消息队列之中,这时候两个进程都不拥有令牌,也就是都是s0状态。这个分布式系统就这件循环地传送令牌。
由于进程是可能崩溃的,我们需要保证在进程崩溃重启后,系统仍然能够正常运行,或者说我们要从某个检查点恢复程序的运行状态,这时就需要将系统在某个时间点的状态保存起来。也就是说我们需要对分布式系统进行一次快照存储,保存每个节点在当时的状态以及每个消息队列在当时的状态。举个例子,假如在上图右上角的时刻对系统进行一个快照存储,那么对应的状态就是:
| p | s0 |
| q | s0 |
| p->q | token |
| q->o | empty |
假如程序在此时崩溃了,那么在重启之后,就可以恢复到保存的快照状态继续执行。
可是由于p和q是两个进程,时间不同步,假如p进程在发送token之后进行了快照存储,q进程在p发送token之前进行快照存储,那么就会出现这种情况:
1:p进程保存快照的时候由于p进程已经发送了token,token在q进程的队列中,所以p进程保存快照时认定token不在p进程也不在p进程的接收队列中。
2:q进程保存快照时由于比p进程早一些,此时p进程还没有发送token,因此q进程认定token不在q进程也不在q进程的接收队列中。
这样保存的全局快照里发现token消失不见了。
为了解决这问题,chamdy-lamport算法提出了marker消息的概念:
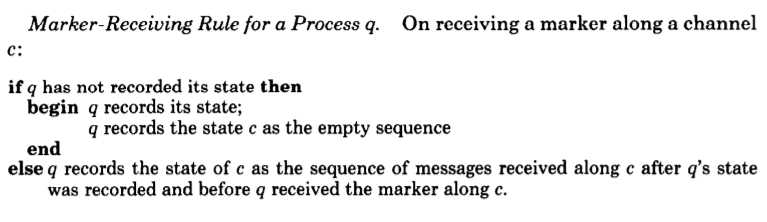
在上图右上角中p发送完token后发起一次快照,发送marker给q,q接收到marker消息,保存本地状态,由于队列FIFO,所以q接收marker消息时肯定已经接收到了token,所以q保存自己状态为s1,保存p->q状态为empty,然后q发送marker给p,p接收到marker,检查在p保存状态后有没有收到q的消息,由于没有收到,所以保存q->p队列的状态为空。到此一轮快照保存结束,全局的状态为:
| p | s0 |
| q | s1 |
| p->q | empty |
| q->p | empty |
这个全局状态就对应的是上图右下角的状态,此时全局的一致性状态保存成功。
以上只是一个简单的例子,实际上chandy-lamport对算法的正确性有严格的公式推导,感兴趣可以参考https://lamport.azurewebsites.net/pubs/chandy.pdf
chandy-lamport 分布式一致性快照 算法详细介绍
标签:com 严格 问题 算法 发送 text body RKE ima
原文地址:https://www.cnblogs.com/yuanyifei1/p/10360465.html