标签:相关 tools inf 连接 发布 cli bin 9.png cpp
android要与ROS通讯,一种是基于rosbridge,另一种是基于rosjava库。
相关参考例子工程
rosbridge例子:

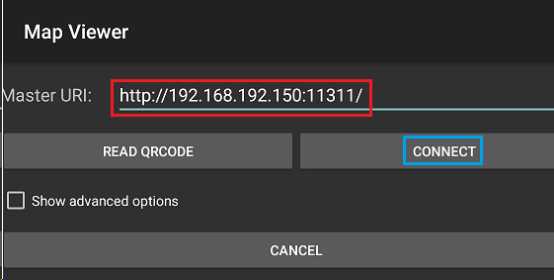
保证手机跟Raspberry Pi 3连接同一个网络,通过PC 获取Raspberry Pi 3的IP=XXX.XXX.XXX.XXX

如果大家对博文的相关类容感兴趣,或有什么技术疑问,欢迎加入下面的《SLAM+语音机器人DIY》QQ技术交流群,一起讨论学习^_^

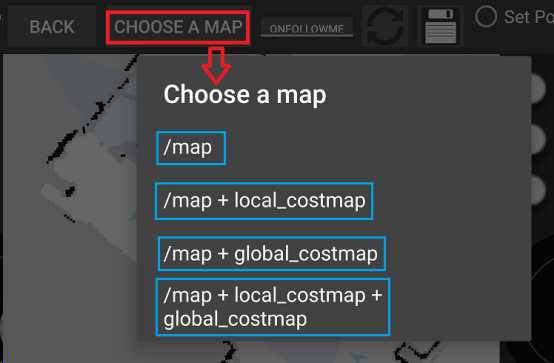
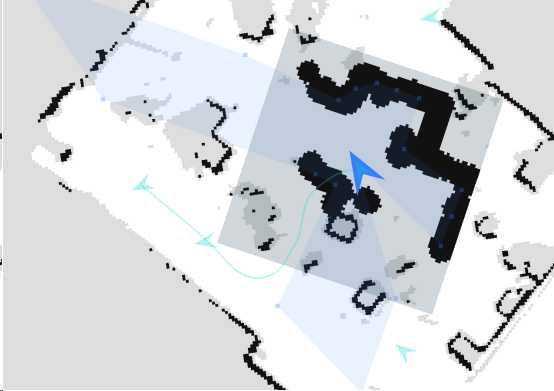
SLAM+语音机器人DIY系列:(八)高阶拓展——1.miiboo机器人安卓手机APP开发
标签:相关 tools inf 连接 发布 cli bin 9.png cpp
原文地址:https://www.cnblogs.com/hiram-zhang/p/10421412.html
{kind=link}