标签:family decode 一段 value structure 遥控器 接收 not 转换
1、红外接收头介绍
一、什么是红外接收头?
红外遥控器发出的信号是一连串的二进制脉冲码。为了使其在无线传输过程中免受其他红外信号的干扰,通常都是先将其调制在特定的载波频率上,然后再经红外发射二极管发射出去,而红外线接收装置则要滤除其他杂波,叧接收该特定频率的信号并将其还原成二进制脉冲码,也就是解调.
二、工作原理
内置接收管将红外发射管发射出来癿光信号转换为微弱的电信号,此信号经由IC内部放大器进行放大,然后通过自动增益控制、带通滤波、解调变、波形整形后还原为遥控器发射出的原始编码,经由接收头的信号输出脚输入到电器上的编码识别电路。
三、红外接收头的引脚与连线

红外接收头有三个引脚如下图:
用的时候将VOUT接到模拟口,GND接到实验板上的GND,VCC接到实验板上的+5v。
红外遥控实验
1、实验器件
红外遥控器:1个
红外接收头:1个
LED灯:6个
220Ω电阻:6个
多彩面包线:若干
2、实验连线
首先将板子连接好;接着将红外接收头按照上述方法接好,将VOUT接到数字11口引脚,将LED灯通过电阻接到数字引脚2,3,4,5,6,7。返样就完成了电路部分的连接。
3、实验原理
要想对某一遥控器进行解码必须要了解该遥控器的编码方式。本产品使用的控器的码方式为:NEC协议。下面就介绍一下NEC协议:
·NEC协议介绍:特点:(1)8位地址位,8位命令位
(2)为了可靠性地址位和命令位被传输两次
(3)脉冲位置调制
(4)载波频率38khz
(5)每一位癿时间为1.125ms戒2.25ms
·逻辑 0和1的定义如下图
协议如下: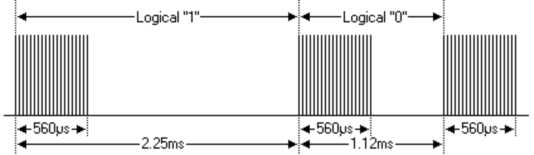
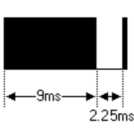
·按键按下立刻松开的发射脉冲:

上面图片显示了NEC的协议典型的脉冲序列。注意:这首先发送LSB(最低位)的协议。在上面癿脉冲传输的地址为0x59命令为0x16。一个消息是由一个9ms的高电平开始,随后有一个4.5ms的低电平,(返两段电平组成引寻码)然后由地址码和命令码。地址和命令传输两次。第二次所有位都取反,可用于对所收到的消息中的确认使用。总传输时间是恒定的,因为每一点与它取反长度重复。如果你不感兴趣,你可以忽略这个可靠性取反,也可以扩大地址和命令,以每16位!
按键按下一段时间才松开的发射脉冲:
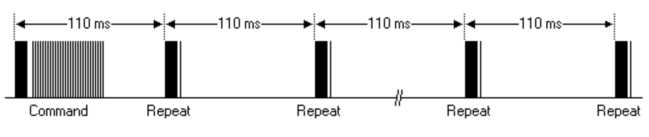
一个命令发送一次,即使在遥控器上的按键仍然按下。当按键一直按下时,第一个110ms癿脉冲与上图一样,之后每110ms重复代码传输一次。返个重复代码是由一个9ms的高电平脉冲和一个2.25ms低电平和560μs癿高电平组成。
·重复脉冲
注意:脉冲波形进入一体化接收头以后,因为一体化接收头里要迕解码、信号放大和整形,故要注意:在没有红外信号时,其输出端为高电平,有信号时为低电平,故其输出信号电平正好和发射端相反。接收端脉冲大家可以通过示波器看到,结合看到的波形理解程序。
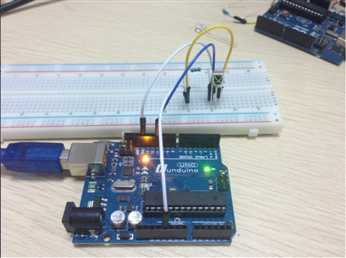
线路连接图:
1 #include <IRremote.h> 2 int RECV_PIN = 11; 3 int LED1 = 2; 4 int LED2 = 3; 5 int LED3 = 4; 6 int LED4 = 5; 7 int LED5 = 6; 8 int LED6 = 7; 9 long on1 = 0x00FFA25D; 10 long off1 = 0x00FFE01F; 11 long on2 = 0x00FF629D; 12 long off2 = 0x00FFA857; 13 long on3 = 0x00FFE21D; 14 long off3 = 0x00FF906F; 15 long on4 = 0x00FF22DD; 16 long off4 = 0x00FF6897; 17 long on5 = 0x00FF02FD; 18 long off5 = 0x00FF9867; 19 long on6 = 0x00FFC23D; 20 long off6 = 0x00FFB047; 21 IRrecv irrecv(RECV_PIN); 22 decode_results results; 23 // Dumps out the decode_results structure. 24 // Call this after IRrecv::decode() 25 // void * to work around compiler issue 26 //void dump(void *v) { 27 // decode_results *results = (decode_results *)v 28 void dump(decode_results *results) { 29 int count = results->rawlen; 30 if (results->decode_type == UNKNOWN) 31 { 32 Serial.println("Could not decode message"); 33 } 34 else 35 { 36 if (results->decode_type == NEC) 37 { 38 Serial.print("Decoded NEC: "); 39 } 40 else if (results->decode_type == SONY) 41 { 42 Serial.print("Decoded SONY: "); 43 } 44 else if (results->decode_type == RC5) 45 { 46 Serial.print("Decoded RC5: "); 47 } 48 else if (results->decode_type == RC6) 49 { 50 Serial.print("Decoded RC6: "); 51 } 52 Serial.print(results->value, HEX); 53 Serial.print(" ("); 54 Serial.print(results->bits, DEC); 55 Serial.println(" bits)"); 56 } 57 Serial.print("Raw ("); 58 Serial.print(count, DEC); 59 Serial.print("): "); 60 61 for (int i = 0; i < count; i++) 62 { 63 if ((i % 2) == 1) { 64 Serial.print(results->rawbuf[i]*USECPERTICK, DEC); 65 } 66 else 67 { 68 Serial.print(-(int)results->rawbuf[i]*USECPERTICK, DEC); 69 } 70 Serial.print(" "); 71 } 72 Serial.println(""); 73 } 74 75 void setup() 76 { 77 pinMode(RECV_PIN, INPUT); 78 pinMode(LED1, OUTPUT); 79 pinMode(LED2, OUTPUT); 80 pinMode(LED3, OUTPUT); 81 pinMode(LED4, OUTPUT); 82 pinMode(LED5, OUTPUT); 83 pinMode(LED6, OUTPUT); 84 pinMode(13, OUTPUT); 85 Serial.begin(9600); 86 87 irrecv.enableIRIn(); // Start the receiver 88 } 89 90 int on = 0; 91 unsigned long last = millis(); 92 93 void loop() 94 { 95 if (irrecv.decode(&results)) 96 { 97 // If it‘s been at least 1/4 second since the last 98 // IR received, toggle the relay 99 if (millis() - last > 250) 100 { 101 on = !on; 102 // digitalWrite(8, on ? HIGH : LOW); 103 digitalWrite(13, on ? HIGH : LOW); 104 dump(&results); 105 } 106 if (results.value == on1 ) 107 digitalWrite(LED1, HIGH); 108 if (results.value == off1 ) 109 digitalWrite(LED1, LOW); 110 if (results.value == on2 ) 111 digitalWrite(LED2, HIGH); 112 if (results.value == off2 ) 113 digitalWrite(LED2, LOW); 114 if (results.value == on3 ) 115 digitalWrite(LED3, HIGH); 116 if (results.value == off3 ) 117 digitalWrite(LED3, LOW); 118 if (results.value == on4 ) 119 digitalWrite(LED4, HIGH); 120 if (results.value == off4 ) 121 digitalWrite(LED4, LOW); 122 if (results.value == on5 ) 123 digitalWrite(LED5, HIGH); 124 if (results.value == off5 ) 125 digitalWrite(LED5, LOW); 126 if (results.value == on6 ) 127 digitalWrite(LED6, HIGH); 128 if (results.value == off6 ) 129 digitalWrite(LED6, LOW); 130 last = millis(); 131 irrecv.resume(); // Receive the next value 132 } 133 }
五、程序功能
对遥控器发射出来的编码脉冲进行解码,根据解码结果执行相应的动作。返样大家就可以用遥控器遥控你的器件了,让它听你的指挥。
实验截图:

标签:family decode 一段 value structure 遥控器 接收 not 转换
原文地址:https://www.cnblogs.com/SkystarX/p/12180793.html