标签:ttl 配置 cer 参数 streams 提取 min 目标 lan
We have tested the feasibility of the proposed human objects detection and tracking scheme by processing video steam on edge computing devices. The experimental setup and results are discussed in this section.
通过在边缘计算设备上处理视频流,验证了所提出的人体目标检测与跟踪方案的可行性。本节讨论了实验装置和结果。
A. Experimental Setup
A、实验装置
A concept-proof prototype of the system has been built that consists of the edge computing and fog computing layers to validate our proposed scheme.
建立了由边缘计算层和雾计算层组成的系统概念验证原型,验证了本文提出的方案。
The edge computing node is a Raspberry PI 3 Model B with the configuration as follows: 1.2GHz 64-bit quad-core ARMv8 CPU, the memory is 1GB LPDDR2-900 SDRAM and operation system is Raspbian based on Linux kernel. The fog computing layer functions are implemented on a laptop, which configuration is as follows: the processor is 2.3 GHz Intel Core i7, the RAM memory is 16 GB and the operating system is Ubuntu 16.04.
边缘计算节点为树莓派3代B型,配置为:1.2GHz 64位四核ARMv8 CPU,内存为1GB LPDDR2-900 SDRAM,操作系统为基于Linux内核的Raspbian。雾计算层功能在笔记本电脑上实现,配置如下:处理器为2.3GHz英特尔酷睿i7,内存为16GB,操作系统为Ubuntu16.04。
The software application for human detection and tracking is implemented using C++ and python programming language and OpenCV library (version3.2.0) [23].
使用C++和Python编程语言和OpenCV库(版本3.2.0)实现了人体检测和跟踪软件应用。
B. Experimental Results
B、 实验结果
This section presents the experimental results on human object detection, object tracking and multi-tracker lifetime handle such as phase in & out of frame, re-tracking after tracked object lost, etc.
这一部分介绍了人体目标检测、目标跟踪和多跟踪器寿命处理的实验结果,如帧内和帧外相位、跟踪目标丢失后的再跟踪等。
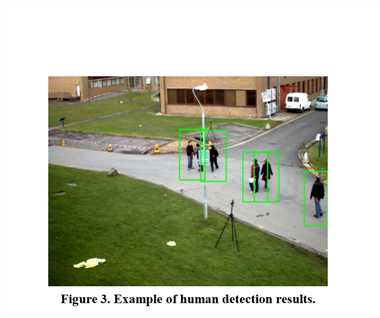
1) Human detection: Figure 3 is an example of human object detection results. As it is computationally expensive to extract HOG features and calculate for classifying human/non-human objects, we reduced the workload of the edge device by using lower detection frequency. It detects frequency parameters though executing human detection algorithm at finite frames interval to improve the performance. In our application, the human detection frequency is once every five frames.
1) 人体检测:图3是人体目标检测结果的一个例子。由于HOG特征的提取和对人体/非人体目标分类的计算量较大,因此采用较低的检测频率,减少了边缘检测的工作量。它通过在有限帧间隔内执行人体检测算法来检测频率参数,提高了检测性能。在我们的应用中,人体检测频率是每五帧一次。
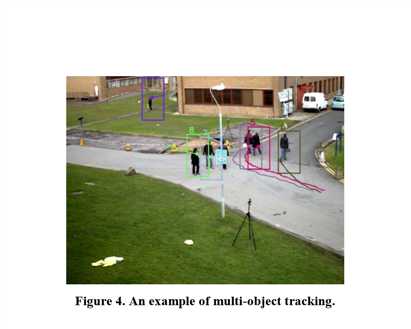
2) Object tracking: Figure 4 shows an example of the multiobject tracking results. Multi-tracker object queue is designed to manage tracker lifetime. Once the human object detection processing is done, tracker filter compares detected human and the multi-tracker object queue to rule out the duplicated trackers. Then those newly detected human objects are initialized as KCF trackers and appended to the multi-tracker object queue. During execution time, each tracker runs KCF tracking algorithm independently on target region through processing the video stream frame by frame until the object phases out, or it lost the object in the scenario.
2) 对象跟踪:图4显示了多对象跟踪结果的示例。多跟踪器对象队列用于管理跟踪器生存期。一旦完成了人体目标检测处理,跟踪滤波器将检测到的人体和多跟踪器对象队列进行比较,以排除重复的跟踪器。然后将新检测到的人体对象初始化为KCF跟踪器,并附加到多跟踪器对象队列中。在执行过程中,每个跟踪器通过逐帧处理视频流,在目标区域上独立运行KCF跟踪算法,直到目标逐渐消失,或者在场景中丢失目标。
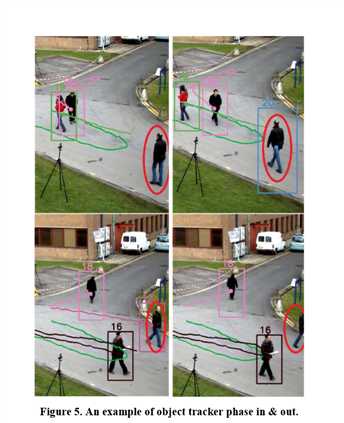
3) Object tracker phase in & out:The boundary region is defined to handle scenarios that moving objects step in or out of the frame. All detected human objects within the boundary region are considered as tracking targets. They will be added to the multi-tracker queue. While in step out scenarios, those tracked objects that are moving out of the boundary region will be deleted and the corresponding trackers become an inactive status. After each frame is processed, those inactive trackers will be removed from the multi-tracker object queue such that the computing resources are relieved for future tasks. And the movement history is exported to tracking history log for further analysis. Figure 5 presents an example of the object tracker phase in & out results.
3) 对象跟踪器阶段输入和输出:定义边界区域以处理移动对象进入或离开帧的场景。将边界区域内所有检测到的人体目标视为跟踪目标。它们将被添加到多跟踪器队列中。而在跳出场景中,那些正在移出边界区域的被跟踪对象将被删除,相应的跟踪器将变为非活动状态。在处理完每一帧后,这些不活动的跟踪器将从多跟踪器对象队列中移除,以便为将来的任务释放计算资源。并将运动历史导出到跟踪历史日志中进行进一步分析。图5显示了对象跟踪器逐步输入和输出结果的示例。
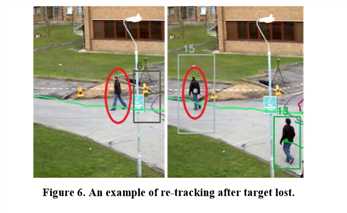
4) Tracking object lost: Because of the occlusion between the background environment and the tracked objects, color appearance and illumination, the tracker may lose the objects of interest. It’s necessary to handle such scenarios so that failed trackers could be cleared from the multi-tracker queue and the lost objects can be re-detected and re-tracked as new objects of interest. Figure 6 shows a scenario where the tracker loses the object (the man in a black jacket on the left, marked as object #6) when he walked behind the blue signboard. Then the detection algorithm identified this person as a new object and assigned him to a new tracker (marked as object #15).
4) 跟踪对象丢失:由于背景环境和被跟踪对象之间的遮挡、颜色外观和照明,跟踪器可能会丢失感兴趣的对象。有必要处理这样的场景,以便从多跟踪器队列中清除失败的跟踪器,并将丢失的对象作为感兴趣的新对象重新检测和跟踪。图6显示了一个场景,当跟踪器走到蓝色的招牌后面时,它会丢失这个物体(左边穿黑色夹克的人,标记为对象#6)。然后,检测算法将此人识别为一个新对象,并将其分配给一个新的跟踪器(标记为对象#15)。
C. Discussions
C、 讨论
The algorithms are implemented and tested on both the edge and fog devices. The edge computing node is a Raspberry PI 3 Model B and the fog computing layer functions are implemented on a laptop. Their configurations are described above in the experimental setup subsection.
算法在边缘和光纤陀螺两种设备上都得到了实现和测试。边缘计算节点为树莓派3代模型B,雾计算层功能在笔记本上实现。它们的配置在上面的实验设置小节中描述。
Detection accuracy varies according to the video input resolution and the angle where the camera is placed. The algorithm works best when detecting a human from an angle of zero. But in practice when the camera is on the ceiling, it is harder to detect the human objects. The distance from the camera is also another factor that affects the detection rate. We changed the frame size to have the same frame with different cameras, the angle is, however, cannot be fixed.
检测精度根据视频输入分辨率和相机放置的角度而变化。该算法在从零角度检测人时效果最好。但在实际应用中,当摄像机位于天花板上时,很难检测到人体目标。与摄像机的距离也是影响检测率的另一个因素。我们改变了帧的大小,使同一帧有不同的相机,但角度是不能是固定的。
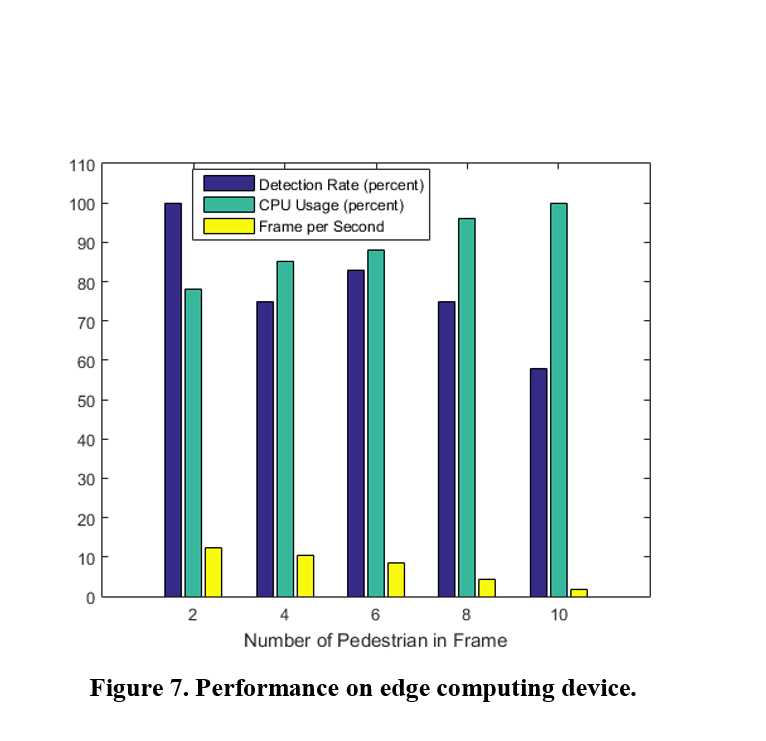
Figure 7 shows that taking the Raspberry PI as the edge computing device, the experiment has achieved the processing speed of 12.2 frames per second by using 78% to 100% of the CPU and 90 to 120 MB of the RAM, corresponding to the detected number of human objects in a frame. Actually, on the fog device, the laptop, the same video streams, the same processing performance was achieved using 67% to 81% of the CPU and 130 to 150 MB of RAM.
图7显示,以树莓派为边缘计算设备,实验通过使用78%到100%的CPU和90到120 MB的RAM,实现了每秒12.2帧的处理速度,与一帧中检测到的人体数量相对应。实际上,在雾设备笔记本电脑上,同样的视频流,同样的处理性能是用67%到81%的CPU和130到150MB的RAM实现的。
In this paper, a smart surveillance architecture is proposed, which leverages the advantages of the edge computing and fog computing paradigms to achieve the goal of on-site, real-time video processing for online human objects detection and tracking. A concept-proof testbed has been constructed, in which a laptop serves as fog computing node, and a Raspberry PI takes responsibility of edge computing node. A HOG+SVM based human detection and a KCF based object tracking algorithms are implemented on the edge and fog nodes. Using real-world pedestrian surveillance video streams, the experimental study has verified that the three-layered smart surveillance architecture is a promising solution for delay-sensitive, mission-critical tasks in many real-time surveillance applications, such as safety monitoring in Smart Cities, situational awareness in a battlefield, smart environmental criminology, etc. Our on-going efforts include the following tasks:
本文提出了一种智能监控体系结构,该结构利用边缘计算和雾计算两种计算模式的优点,实现了在线人体目标检测和跟踪的实时视频处理。搭建了一个概念验证实验台,其中笔记本电脑作为雾计算节点,树莓派负责边缘计算节点。在边缘和雾节点分别实现了基于HOG+SVM的人体检测和基于KCF的目标跟踪算法。实验研究利用真实的行人监控视频流,验证了三层智能监控体系结构在许多实时监控应用中,如智能城市的安全监控、战场的态势感知、智能环境犯罪学等。我们正在进行的工作包括:
1) The adopted detection methods are still computationally expensive to achieve satisfactory performance on edge devices. We are exploring to build lightweight algorithms that are well balanced among the complexity, resource consumption, and detection rate.
1) 为了在边缘设备上获得满意的性能,所采用的检测方法在计算上仍然是昂贵的。我们正在探索构建在复杂度、资源消耗和检测率之间很好平衡的轻量级算法。
2) As the example illustrated in Fig. 6, once a tracked object is lost and re-detected, the information for the same object or human is going to be saved on a new queue, which is not desired. A more efficient and precise approach is mandatory, which is expected to establish the connection and continue the existing tracking task instead of initiating a new tracker.
2) 如图6所示的示例,一旦被跟踪对象丢失并被重新检测,相同对象或人的信息将被保存在新队列中,这是不期望的。一种更高效和精确的方法是强制性的,期望建立连接并继续现有的跟踪任务,而不是启动新的跟踪器。
3) We are also investigating features that enable the higher layer functions such as behavior identification, which is particularly essential to identify and raise alarms against certain dangerous or malicious activities before damages are caused.
3) 我们也在研究能够实现更高层次功能的特性,如行为识别,这对于在造成损害之前识别并对某些危险或恶意活动发出警报尤为重要。
标签:ttl 配置 cer 参数 streams 提取 min 目标 lan
原文地址:https://www.cnblogs.com/caihan/p/12251640.html