标签:building closed loading net creates ons store redist key

1 /** 2 * This file is part of ORB-SLAM2. 3 * 4 * Copyright (C) 2014-2016 Raúl Mur-Artal <raulmur at unizar dot es> (University of Zaragoza) 5 * For more information see <https://github.com/raulmur/ORB_SLAM2> 6 * 7 * ORB-SLAM2 is free software: you can redistribute it and/or modify 8 * it under the terms of the GNU General Public License as published by 9 * the Free Software Foundation, either version 3 of the License, or 10 * (at your option) any later version. 11 * 12 * ORB-SLAM2 is distributed in the hope that it will be useful, 13 * but WITHOUT ANY WARRANTY; without even the implied warranty of 14 * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the 15 * GNU General Public License for more details. 16 * 17 * You should have received a copy of the GNU General Public License 18 * along with ORB-SLAM2. If not, see <http://www.gnu.org/licenses/>. 19 */ 20 21 22 #ifndef SYSTEM_H 23 #define SYSTEM_H 24 25 #include<string> 26 #include<thread> 27 #include<opencv2/core/core.hpp> 28 29 #include "Tracking.h" 30 #include "FrameDrawer.h" 31 #include "MapDrawer.h" 32 #include "Map.h" 33 #include "LocalMapping.h" 34 #include "LoopClosing.h" 35 #include "KeyFrameDatabase.h" 36 #include "ORBVocabulary.h" 37 #include "Viewer.h" 38 39 namespace ORB_SLAM2 40 { 41 42 class Viewer; 43 class FrameDrawer; 44 class Map; 45 class Tracking; 46 class LocalMapping; 47 class LoopClosing; 48 49 class System 50 { 51 public: 52 // Input sensor 53 enum eSensor{ 54 MONOCULAR=0, 55 STEREO=1, 56 RGBD=2 57 }; 58 59 public: 60 61 // Initialize the SLAM system. It launches the Local Mapping, Loop Closing and Viewer threads. 62 System(const string &strVocFile, const string &strSettingsFile, const eSensor sensor, const bool bUseViewer = true); 63 64 // Proccess the given stereo frame. Images must be synchronized and rectified. 65 // Input images: RGB (CV_8UC3) or grayscale (CV_8U). RGB is converted to grayscale. 66 // Returns the camera pose (empty if tracking fails). 67 cv::Mat TrackStereo(const cv::Mat &imLeft, const cv::Mat &imRight, const double ×tamp); 68 69 // Process the given rgbd frame. Depthmap must be registered to the RGB frame. 70 // Input image: RGB (CV_8UC3) or grayscale (CV_8U). RGB is converted to grayscale. 71 // Input depthmap: Float (CV_32F). 72 // Returns the camera pose (empty if tracking fails). 73 cv::Mat TrackRGBD(const cv::Mat &im, const cv::Mat &depthmap, const double ×tamp); 74 75 // Proccess the given monocular frame 76 // Input images: RGB (CV_8UC3) or grayscale (CV_8U). RGB is converted to grayscale. 77 // Returns the camera pose (empty if tracking fails). 78 cv::Mat TrackMonocular(const cv::Mat &im, const double ×tamp); 79 80 // This stops local mapping thread (map building) and performs only camera tracking. 81 void ActivateLocalizationMode(); 82 // This resumes local mapping thread and performs SLAM again. 83 void DeactivateLocalizationMode(); 84 85 // Reset the system (clear map) 86 void Reset(); 87 88 // All threads will be requested to finish. 89 // It waits until all threads have finished. 90 // This function must be called before saving the trajectory. 91 void Shutdown(); 92 93 // Save camera trajectory in the TUM RGB-D dataset format. 94 // Only for stereo and RGB-D. This method does not work for monocular. 95 // Call first Shutdown() 96 // See format details at: http://vision.in.tum.de/data/datasets/rgbd-dataset 97 void SaveTrajectoryTUM(const string &filename); 98 99 // Save keyframe poses in the TUM RGB-D dataset format. 100 // This method works for all sensor input. 101 // Call first Shutdown() 102 // See format details at: http://vision.in.tum.de/data/datasets/rgbd-dataset 103 void SaveKeyFrameTrajectoryTUM(const string &filename); 104 105 // Save camera trajectory in the KITTI dataset format. 106 // Only for stereo and RGB-D. This method does not work for monocular. 107 // Call first Shutdown() 108 // See format details at: http://www.cvlibs.net/datasets/kitti/eval_odometry.php 109 void SaveTrajectoryKITTI(const string &filename); 110 111 // TODO: Save/Load functions 112 // SaveMap(const string &filename); 113 // LoadMap(const string &filename); 114 115 private: 116 117 // Input sensor 118 eSensor mSensor; 119 120 // ORB vocabulary used for place recognition and feature matching. 121 ORBVocabulary* mpVocabulary; 122 123 // KeyFrame database for place recognition (relocalization and loop detection). 124 KeyFrameDatabase* mpKeyFrameDatabase; 125 126 // Map structure that stores the pointers to all KeyFrames and MapPoints. 127 Map* mpMap; 128 129 // Tracker. It receives a frame and computes the associated camera pose. 130 // It also decides when to insert a new keyframe, create some new MapPoints and 131 // performs relocalization if tracking fails. 132 Tracking* mpTracker; 133 134 // Local Mapper. It manages the local map and performs local bundle adjustment. 135 LocalMapping* mpLocalMapper; 136 137 // Loop Closer. It searches loops with every new keyframe. If there is a loop it performs 138 // a pose graph optimization and full bundle adjustment (in a new thread) afterwards. 139 LoopClosing* mpLoopCloser; 140 141 // The viewer draws the map and the current camera pose. It uses Pangolin. 142 Viewer* mpViewer; 143 144 FrameDrawer* mpFrameDrawer; 145 MapDrawer* mpMapDrawer; 146 147 // System threads: Local Mapping, Loop Closing, Viewer. 148 // The Tracking thread "lives" in the main execution thread that creates the System object. 149 std::thread* mptLocalMapping; 150 std::thread* mptLoopClosing; 151 std::thread* mptViewer; 152 153 // Reset flag 154 std::mutex mMutexReset; 155 bool mbReset; 156 157 // Change mode flags 158 std::mutex mMutexMode; 159 bool mbActivateLocalizationMode; 160 bool mbDeactivateLocalizationMode; 161 }; 162 163 }// namespace ORB_SLAM 164 165 #endif // SYSTEM_H
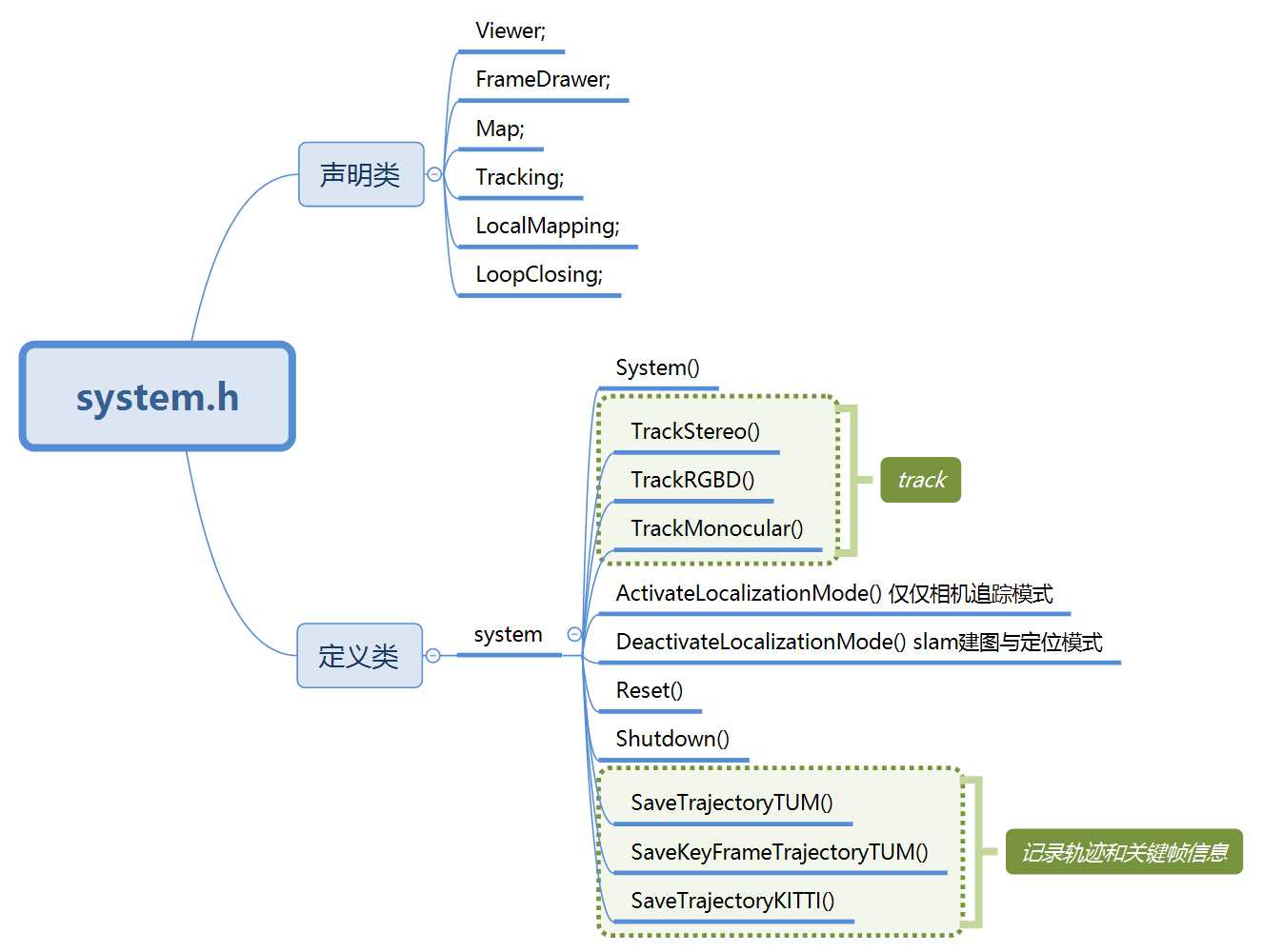
结构图
重要变量
ORBVocabulary* mpVocabulary; KeyFrameDatabase* mpKeyFrameDatabase; Map* mpMap; Tracking* mpTracker; LocalMapping* mpLocalMapper; LoopClosing* mpLoopCloser; Viewer* mpViewer; FrameDrawer* mpFrameDrawer; MapDrawer* mpMapDrawer;
启动线程:
std::thread* mptLocalMapping; std::thread* mptLoopClosing; std::thread* mptViewer;
标签:building closed loading net creates ons store redist key
原文地址:https://www.cnblogs.com/polipolu/p/13159109.html
