标签:获取 频繁 思路 img while 关注 运行时间 stop mamicode
首先需要思考的问题是:什么是调度器(scheduler)?调度器的作用是什么?调度器是一个操作系统的核心部分。可以比作是CPU时间的管理员。调度器主要负责选择某些就绪的进程来执行。不同的调度器根据不同的方法挑选出最适合运行的进程。目前Linux支持的调度器就有RT scheduler、Deadline scheduler、CFS scheduler及Idle scheduler等。我想用一系列文章呈现Linux 调度器的设计原理。
注:文章代码分析基于Linux-4.18.0。
一、什么是调度类
从Linux 2.6.23开始,Linux引入scheduling class的概念,目的是将调度器模块化。这样提高了扩展性,添加一个新的调度器也变得简单起来。一个系统中还可以共存多个调度器。在Linux中,将调度器公共的部分抽象,使用struct sched_class结构体描述一个具体的调度类。系统核心调度代码会通过struct sched_class结构体的成员调用具体调度类的核心算法。先简单的介绍下struct sched_class部分成员作用。
struct sched_class { const struct sched_class *next; void (*enqueue_task) (struct rq *rq, struct task_struct *p, int flags); void (*dequeue_task) (struct rq *rq, struct task_struct *p, int flags); void (*check_preempt_curr)(struct rq *rq, struct task_struct *p, int flags); struct task_struct * (*pick_next_task)(struct rq *rq, struct task_struct *prev, struct rq_flags *rf); /* ... */ };
next:next成员指向下一个调度类(比自己低一个优先级)。在Linux中,每一个调度类都是有明确的优先级关系,高优先级调度类管理的进程会优先获得cpu使用权。
enqueue_task:向该调度器管理的runqueue中添加一个进程。我们把这个操作称为入队。
dequeue_task:向该调度器管理的runqueue中删除一个进程。我们把这个操作称为出队。
check_preempt_curr:当一个进程被唤醒或者创建的时候,需要检查当前进程是否可以抢占当前cpu上正在运行的进程,如果可以抢占需要标记TIF_NEED_RESCHED flag。
pick_next_task:从runqueue中选择一个最适合运行的task。这也算是调度器比较核心的一个操作。例如,我们依据什么挑选最适合运行的进程呢?这就是每一个调度器需要关注的问题。
二、Linux中有哪些调度类
Linux中主要包含dl_sched_class、rt_sched_class、fair_sched_class及idle_sched_class等调度类。每一个进程都对应一种调度策略,每一种调度策略又对应一种调度类(每一个调度类可以对应多种调度策略)。例如实时调度器以优先级为导向选择优先级最高的进程运行。每一个进程在创建之后,总是要选择一种调度策略。针对不同的调度策略,选择的调度器也是不一样的。不同的调度策略对应的调度类如下表。
调度类 描述 调度策略
dl_sched_class deadline调度器 SCHED_DEADLINE
rt_sched_class 实时调度器 SCHED_FIFO、SCHED_RR
fair_sched_class 完全公平调度器 SCHED_NORMAL、SCHED_BATCH
idle_sched_class idle task SCHED_IDLE
针对以上调度类,系统中有明确的优先级概念。每一个调度类利用next成员构建单项链表。优先级从高到低示意图如下:
sched_class_highest---->stop_sched_class .next---->dl_sched_class .next---->rt_sched_class .next---->fair_sched_class .next---->idle_sched_class .next = NULL
Linux调度核心在选择下一个合适的task运行的时候,会按照优先级的顺序便利调度类的pick_next_task函数。因此,SCHED_FIFO调度策略的实时进程永远比SCHED_NORMAL调度策略的普通进程优先运行。代码中pick_next_task函数也有体现。pick_next_task函数就是负责选择一个即将运行的进程,以下贴出省略版代码。
static inline struct task_struct *pick_next_task(struct rq *rq, struct task_struct *prev, struct rq_flags *rf) { const struct sched_class *class; struct task_struct *p; for_each_class(class) { /* 按照优先级顺序便利所有的调度类,通过next指针便利单链表 */ p = class->pick_next_task(rq, prev, rf); if (p) return p; } }
针对CFS调度器,管理的进程都属于SCHED_NORMAL或者SCHED_BATCH策略。后面的部分主要针对CFS调度器讲解。
三、普通进程的优先级
CFS是Completely Fair Scheduler简称,即完全公平调度器。CFS的设计理念是在真实硬件上实现理想的、精确的多任务CPU。CFS调度器和以往的调度器不同之处在于没有时间片的概念,而是分配cpu使用时间的比例。例如:2个相同优先级的进程在一个cpu上运行,那么每个进程都将会分配50%的cpu运行时间。这就是要实现的公平。
以上举例是基于同等优先级的情况下。但是现实却并非如此,有些任务优先级就是比较高。那么CFS调度器的优先级是如何实现的呢?首先,我们引入权重的概念,权重代表着进程的优先级。各个进程之间按照权重的比例分配cpu时间。例如:2个进程A和B。A的权重是1024,B的权重是2048。那么A获得cpu的时间比例是1024/(1024+2048) = 33.3%。B进程获得的cpu时间比例是2048/(1024+2048)=66.7%。我们可以看出,权重越大分配的时间比例越大,相当于优先级越高。在引入权重之后,分配给进程的时间计算公式如下:
分配给进程的时间 = 总的cpu时间 * 进程的权重/就绪队列(runqueue)所有进程权重之和
CFS调度器针对优先级又提出了nice值的概念,其实和权重是一一对应的关系。nice值就是一个具体的数字,取值范围是[-20, 19]。数值越小代表优先级越大,同时也意味着权重值越大,nice值和权重之间可以互相转换。内核提供了一个表格转换nice值和权重。
const int sched_prio_to_weight[40] = { /* -20 */ 88761, 71755, 56483, 46273, 36291, /* -15 */ 29154, 23254, 18705, 14949, 11916, /* -10 */ 9548, 7620, 6100, 4904, 3906, /* -5 */ 3121, 2501, 1991, 1586, 1277, /* 0 */ 1024, 820, 655, 526, 423, /* 5 */ 335, 272, 215, 172, 137, /* 10 */ 110, 87, 70, 56, 45, /* 15 */ 36, 29, 23, 18, 15, };
数组的值可以看作是公式:weight = 1024 / 1.25^nice (nice=10时匹配不上)计算得到。公式中的1.25取值依据是:进程每降低一个nice值,将多获得10% cpu的时间。公式中以1024权重为基准值计算得来,1024权重对应nice值为0,其权重被称为NICE_0_LOAD。默认情况下,大部分进程的权重基本都是NICE_0_LOAD。
四、调度延迟
什么是调度延迟?调度延迟就是保证每一个可运行进程都至少运行一次的时间间隔。例如,每个进程都运行10ms,系统中总共有2个进程,那么调度延迟就是20ms。如果有5个进程,那么调度延迟就是50ms。如果现在保证调度延迟不变,固定是6ms,那么系统中如果有2个进程,那么每个进程运行3ms。如果有6个进程,那么每个进程运行1ms。如果有100个进程,那么每个进程分配到的时间就是0.06ms。随着进程的增加,每个进程分配的时间在减少,进程调度过于频繁,上下文切换时间开销就会变大。因此,CFS调度器的调度延迟时间的设定并不是固定的。当系统处于就绪态的进程少于一个定值(默认值8)的时候,调度延迟也是固定一个值不变(默认值6ms)。当系统就绪态进程个数超过这个值时,我们保证每个进程至少运行一定的时间才让出cpu。这个“至少一定的时间”被称为最小粒度时间。在CFS默认设置中,最小粒度时间是0.75ms。用变量 sysctl_sched_min_granularity 记录。因此,调度周期是一个动态变化的值。调度周期计算函数是__sched_period()。
static u64 __sched_period(unsigned long nr_running) { if (unlikely(nr_running > sched_nr_latency)) return nr_running * sysctl_sched_min_granularity; else return sysctl_sched_latency; }
nr_running是系统中就绪进程数量,当超过sched_nr_latency时,我们无法保证调度延迟,因此转为保证调度最小粒度。如果nr_running并没有超过sched_nr_latency,那么调度周期就等于调度延迟sysctl_sched_latency(6ms)。
五、虚拟时间(virtual time)
CFS调度器的目标是保证每一个进程的完全公平调度。CFS调度器就像是一个母亲,她有很多个孩子(进程)。但是,手上只有一个玩具(cpu)需要公平的分配给孩子玩。假设有2个孩子,那么一个玩具怎么才可以公平让2个孩子玩呢?简单点的思路就是第一个孩子玩10分钟,然后第二个孩子玩10分钟,以此循环下去。CFS调度器也是这样记录每一个进程的执行时间,保证每个进程获取CPU执行时间的公平。因此,哪个进程运行的时间最少,应该让哪个进程运行。
例如,调度周期是6ms,系统一共2个相同优先级的进程A和B,那么每个进程都将在6ms周期时间内内各运行3ms。如果进程A和B,他们的权重分别是1024和820(nice值分别是0和1)。进程A获得的运行时间是6x1024/(1024+820)=3.3ms,进程B获得的执行时间是6x820/(1024+820)=2.7ms。进程A的cpu使用比例是3.3/6x100%=55%,进程B的cpu使用比例是2.7/6x100%=45%。计算结果也符合上面说的“进程每降低一个nice值,将多获得10% CPU的时间”。很明显,2个进程的实际执行时间是不相等的,但是CFS想保证每个进程运行时间相等。因此CFS引入了虚拟时间的概念,也就是说上面的2.7ms和3.3ms经过一个公式的转换可以得到一样的值,这个转换后的值称作虚拟时间。这样的话,CFS只需要保证每个进程运行的虚拟时间是相等的即可。虚拟时间vriture_runtime和实际时间(wall time)转换公式如下:
NICE_0_LOAD vriture_runtime = wall_time * ---------------- weight
进程A的虚拟时间3.3 * 1024 / 1024 = 3.3ms,我们可以看出nice值为0的进程的虚拟时间和实际时间是相等的。进程B的虚拟时间是2.7 * 1024 / 820 = 3.3ms。我们可以看出尽管A和B进程的权重值不一样,但是计算得到的虚拟时间是一样的。因此CFS主要保证每一个进程获得执行的虚拟时间一致即可。在选择下一个即将运行的进程的时候,只需要找到虚拟时间最小的进程即可。为了避免浮点数运算,因此我们采用先放大再缩小的方法以保证计算精度。内核又对公式做了如下转换。
vriture_runtime = wall_time * ---------------- weight NICE_0_LOAD * 2^32 = (wall_time * -------------------------) >> 32 weight 2^32 = (wall_time * NICE_0_LOAD * inv_weight) >> 32 (inv_weight = ------------ ) weight
权重的值已经计算保存到sched_prio_to_weight数组中,根据这个数组我们可以很容易计算inv_weight的值。内核中使用sched_prio_to_wmult数组保存inv_weight的值。计算公式是:sched_prio_to_wmult[i] = 232/sched_prio_to_weight[i]。
const u32 sched_prio_to_wmult[40] = { /* -20 */ 48388, 59856, 76040, 92818, 118348, /* -15 */ 147320, 184698, 229616, 287308, 360437, /* -10 */ 449829, 563644, 704093, 875809, 1099582, /* -5 */ 1376151, 1717300, 2157191, 2708050, 3363326, /* 0 */ 4194304, 5237765, 6557202, 8165337, 10153587, /* 5 */ 12820798, 15790321, 19976592, 24970740, 31350126, /* 10 */ 39045157, 49367440, 61356676, 76695844, 95443717, /* 15 */ 119304647, 148102320, 186737708, 238609294, 286331153, };
系统中使用struct load_weight结构体描述进程的权重信息。weight代表进程的权重,inv_weight等于2^32/weight。
struct load_weight { unsigned long weight; u32 inv_weight; };
将实际时间转换成虚拟时间的实现函数是calc_delta_fair()。calc_delta_fair()调用__calc_delta()函数,__calc_delta()主要功能是实现如下公式的计算。
__calc_delta() = (delta_exec * weight * lw->inv_weight) >> 32 weight 2^32 = delta_exec * ---------------- (lw->inv_weight = --------------- ) lw->weight lw->weight
和上面计算虚拟时间计算公式对比发现。如果需要计算进程的虚拟时间,这里的weight只需要传递参数NICE_0_LOAD,lw参数是进程对应的struct load_weight结构体。
static u64 __calc_delta(u64 delta_exec, unsigned long weight, struct load_weight *lw) { u64 fact = scale_load_down(weight); int shift = 32; __update_inv_weight(lw); if (unlikely(fact >> 32)) { while (fact >> 32) { fact >>= 1; shift--; } } fact = (u64)(u32)fact * lw->inv_weight; while (fact >> 32) { fact >>= 1; shift--; } return mul_u64_u32_shr(delta_exec, fact, shift); }
按照上面说的理论,calc_delta_fair()函数调用__calc_delta()的时候传递的weight参数是NICE_0_LOAD,lw参数是进程对应的struct load_weight结构体。
static inline u64 calc_delta_fair(u64 delta, struct sched_entity *se) { if (unlikely(se->load.weight != NICE_0_LOAD)) /* 1 */ delta = __calc_delta(delta, NICE_0_LOAD, &se->load); /* 2 */ return delta; }
1.按照之前的理论,nice值为0(权重是NICE_0_LOAD)的进程的虚拟时间和实际时间是相等的。因此如果进程的权重是NICE_0_LOAD,进程对应的虚拟时间就不用计算。
2.调用__calc_delta()函数。
Linux通过struct task_struct结构体描述每一个进程。但是调度类管理和调度的单位是调度实体,并不是task_struct。在支持组调度的时候,一个组也会抽象成一个调度实体,它并不是一个task。所以,我们在struct task_struct结构体中可以找到以下不同调度类的调度实体。
struct task_struct { struct sched_entity se; struct sched_rt_entity rt; struct sched_dl_entity dl; /* ... */ }
se、rt、dl分别对应CFS调度器、RT调度器、Deadline调度器的调度实体。
struct sched_entity结构体描述调度实体,包括struct load_weight用来记录权重信息。除此以外我们一直关心的时间信息,肯定也要一起记录。struct sched_entity结构体简化后如下:
struct sched_entity { struct load_weight load; struct rb_node run_node; unsigned int on_rq; u64 sum_exec_runtime; u64 vruntime; };
load:权重信息,在计算虚拟时间的时候会用到inv_weight成员。
run_node:CFS调度器的每个就绪队列维护了一颗红黑树,上面挂满了就绪等待执行的task,run_node就是挂载点。
on_rq:调度实体se加入就绪队列后,on_rq置1。从就绪队列删除后,on_rq置0。
sum_exec_runtime:调度实体已经运行实际时间总合。
vruntime:调度实体已经运行的虚拟时间总合。
六、就绪队列(runqueue)
系统中每个CPU都会有一个全局的就绪队列(cpu runqueue),使用struct rq结构体描述,它是per-cpu类型,即每个cpu上都会有一个struct rq结构体。每一个调度类也有属于自己管理的就绪队列。例如,struct cfs_rq是CFS调度类的就绪队列,管理就绪态的struct sched_entity调度实体,后续通过pick_next_task接口从就绪队列中选择最适合运行的调度实体(虚拟时间最小的调度实体)。struct rt_rq是实时调度器就绪队列。struct dl_rq是Deadline调度器就绪队列。
struct rq { struct cfs_rq cfs; struct rt_rq rt; struct dl_rq dl; }; struct rb_root_cached { struct rb_root rb_root; struct rb_node *rb_leftmost; }; struct cfs_rq { struct load_weight load; unsigned int nr_running; u64 min_vruntime; struct rb_root_cached tasks_timeline; };
load:就绪队列权重,就绪队列管理的所有调度实体权重之和。
nr_running:就绪队列上调度实体的个数。
min_vruntime:跟踪就绪队列上所有调度实体的最小虚拟时间。
tasks_timeline:用于跟踪调度实体按虚拟时间大小排序的红黑树的信息(包含红黑树的根以及红黑树中最左边节点)。
CFS维护了一个按照虚拟时间排序的红黑树,所有可运行的调度实体按照p->se.vruntime排序插入红黑树。如下图所示。
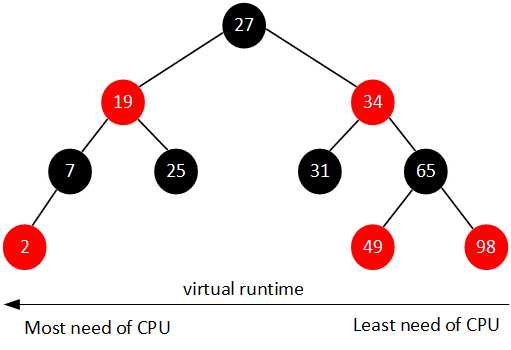
CFS选择红黑树最左边的进程运行。随着系统时间的推移,原来左边运行过的进程慢慢的会移动到红黑树的右边,原来右边的进程也会最终跑到最左边。因此红黑树中的每个进程都有机会运行。
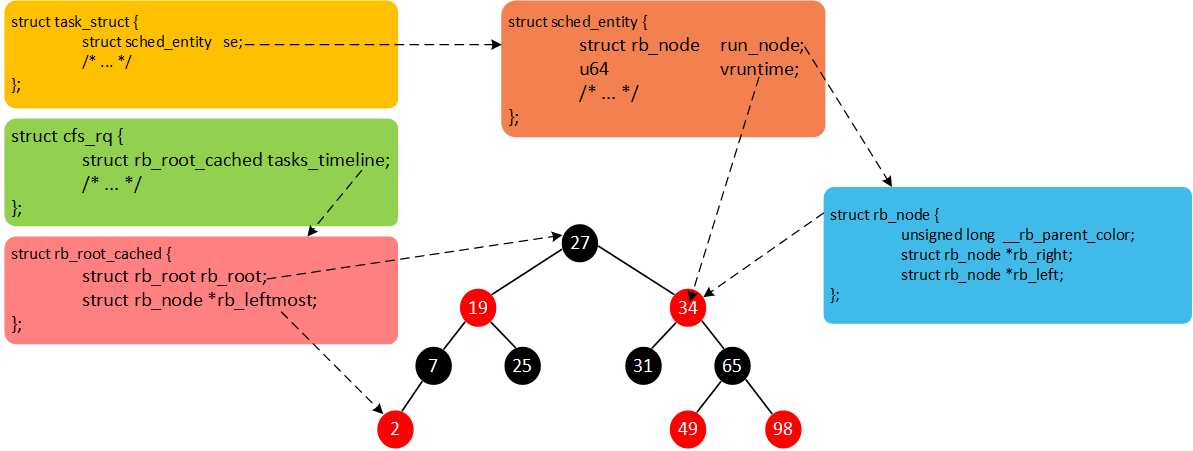
现在我们总结一下。Linux中所有的进程使用task_struct描述。task_struct包含很多进程相关的信息(例如,优先级、进程状态以及调度实体等)。但是,每一个调度类并不是直接管理task_struct,而是引入调度实体的概念。CFS调度器使用sched_entity跟踪调度信息。CFS调度器使用cfs_rq跟踪就绪队列信息以及管理就绪态调度实体,并维护一棵按照虚拟时间排序的红黑树。tasks_timeline->rb_root是红黑树的根,tasks_timeline->rb_leftmost指向红黑树中最左边的调度实体,即虚拟时间最小的调度实体(为了更快的选择最适合运行的调度实体,因此rb_leftmost相当于一个缓存)。每个就绪态的调度实体sched_entity包含插入红黑树中使用的节点rb_node,同时vruntime成员记录已经运行的虚拟时间。我们将这几个数据结构简单梳理,如下图所示。
参考:http://www.wowotech.net/process_management/447.html
标签:获取 频繁 思路 img while 关注 运行时间 stop mamicode
原文地址:https://www.cnblogs.com/hellokitty2/p/13171709.html