标签:部署 war mon verify 缺点 就是 交互 探索 动作
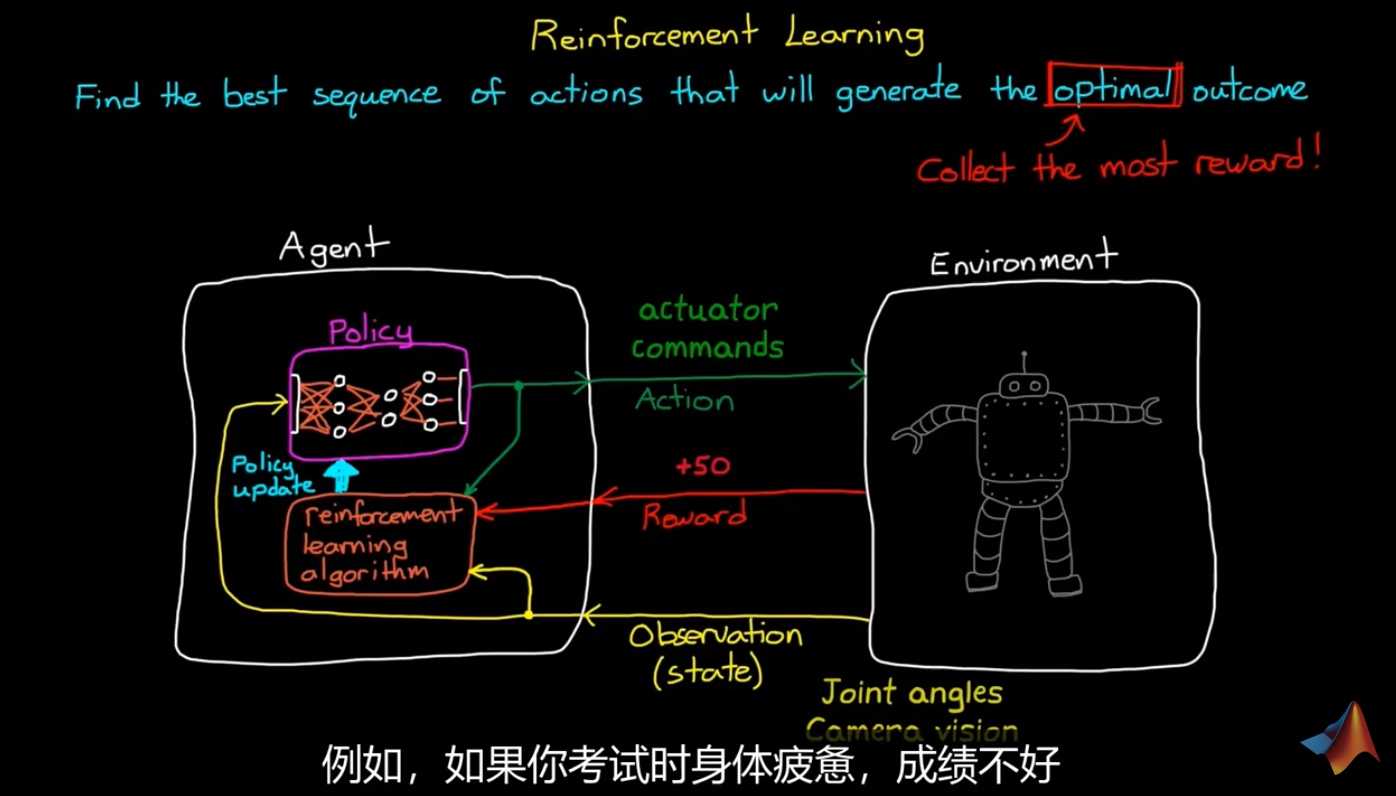
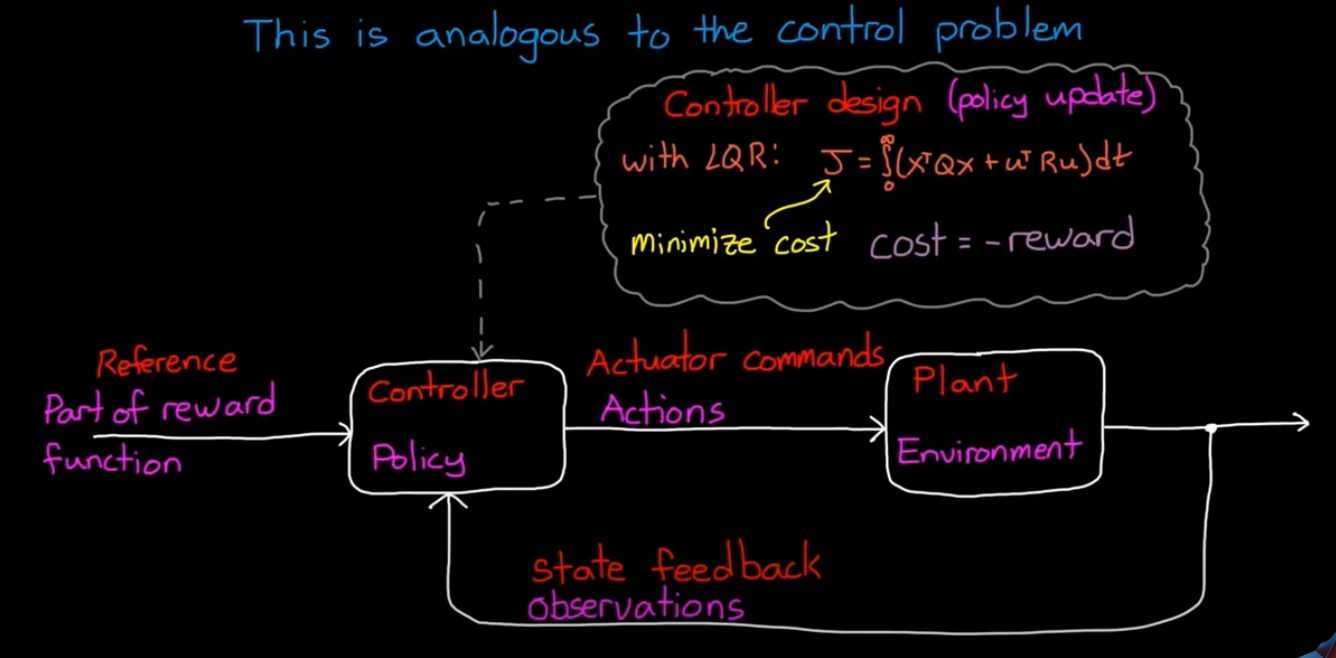
强化学习不同于 监督、非监督学习(与静态数据交互),与环境产生交互,产生最优结果的动作序列。
Agent: 由Policy 和 RL_Alg构成
Enviroment:

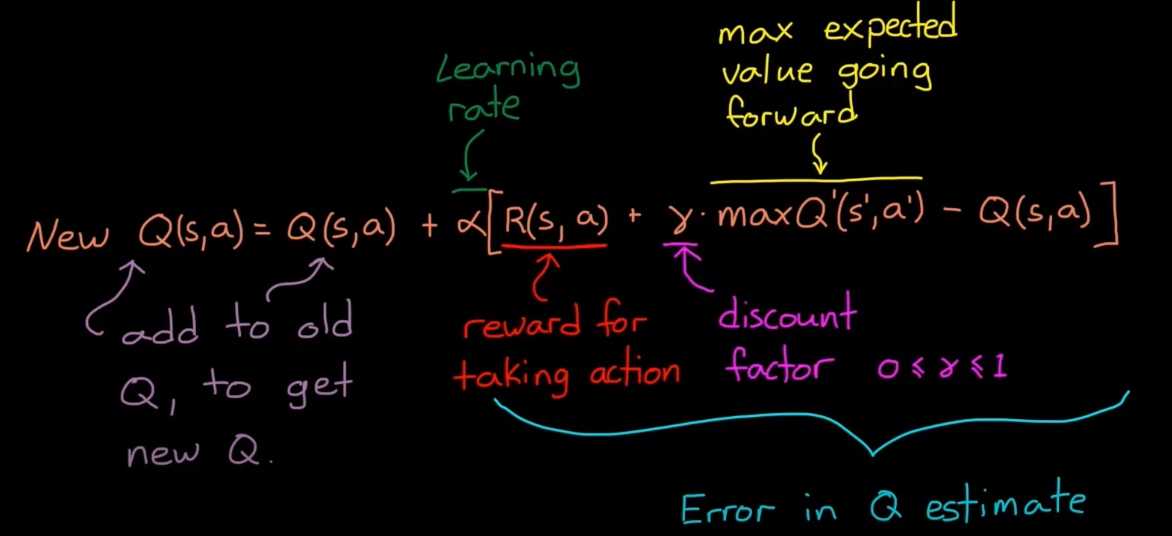
未来奖励折扣:未来Value不最优
未来的不确定性
one step update
更新states-action表格,根据s,选a
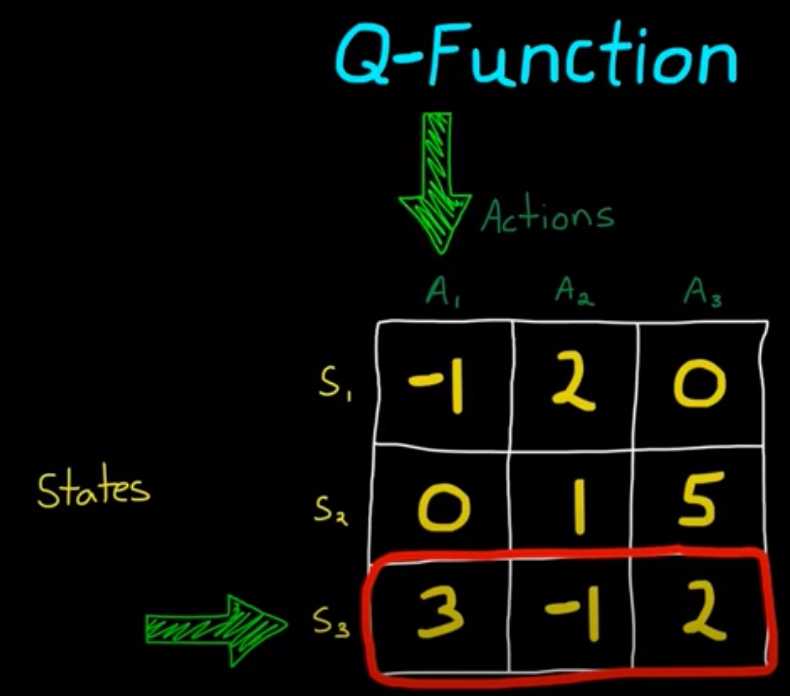
缺点:带来维度灾难
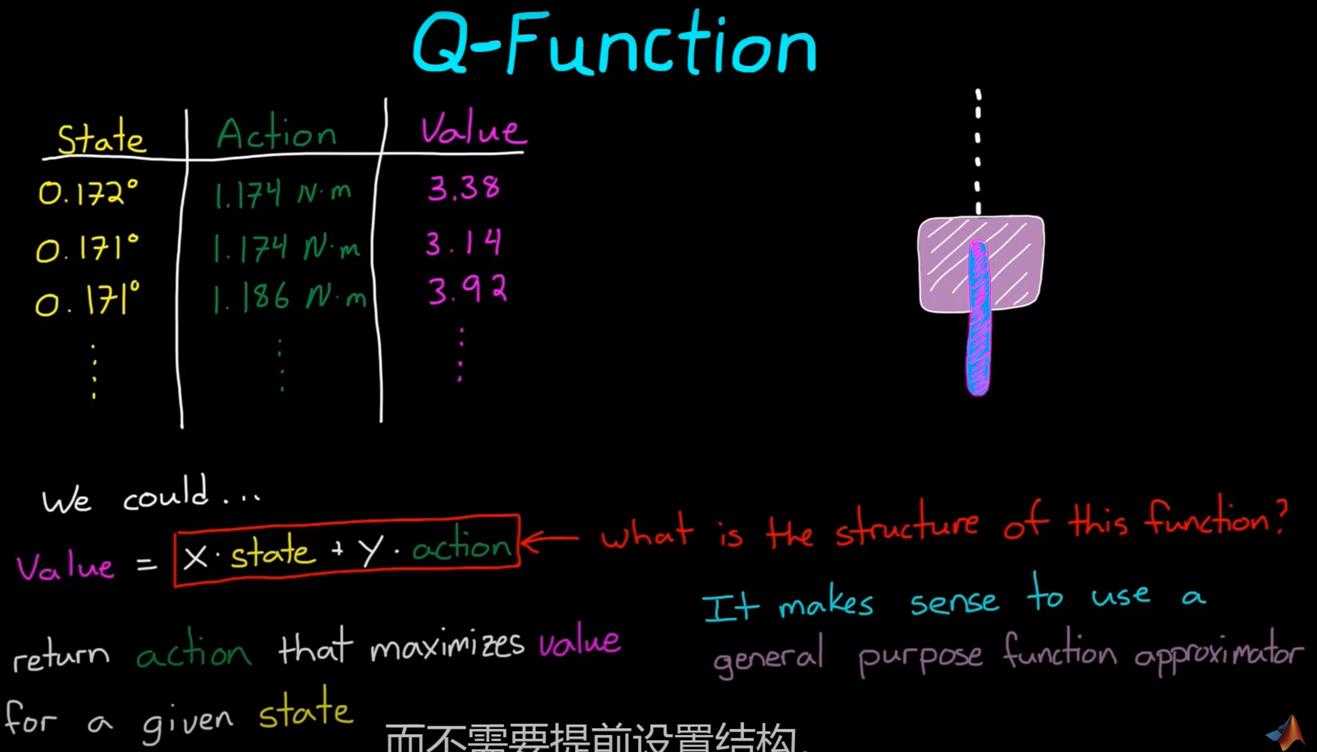
对于连续空间,构建Value = w1 * state + w2 * action
手段:函数近似器
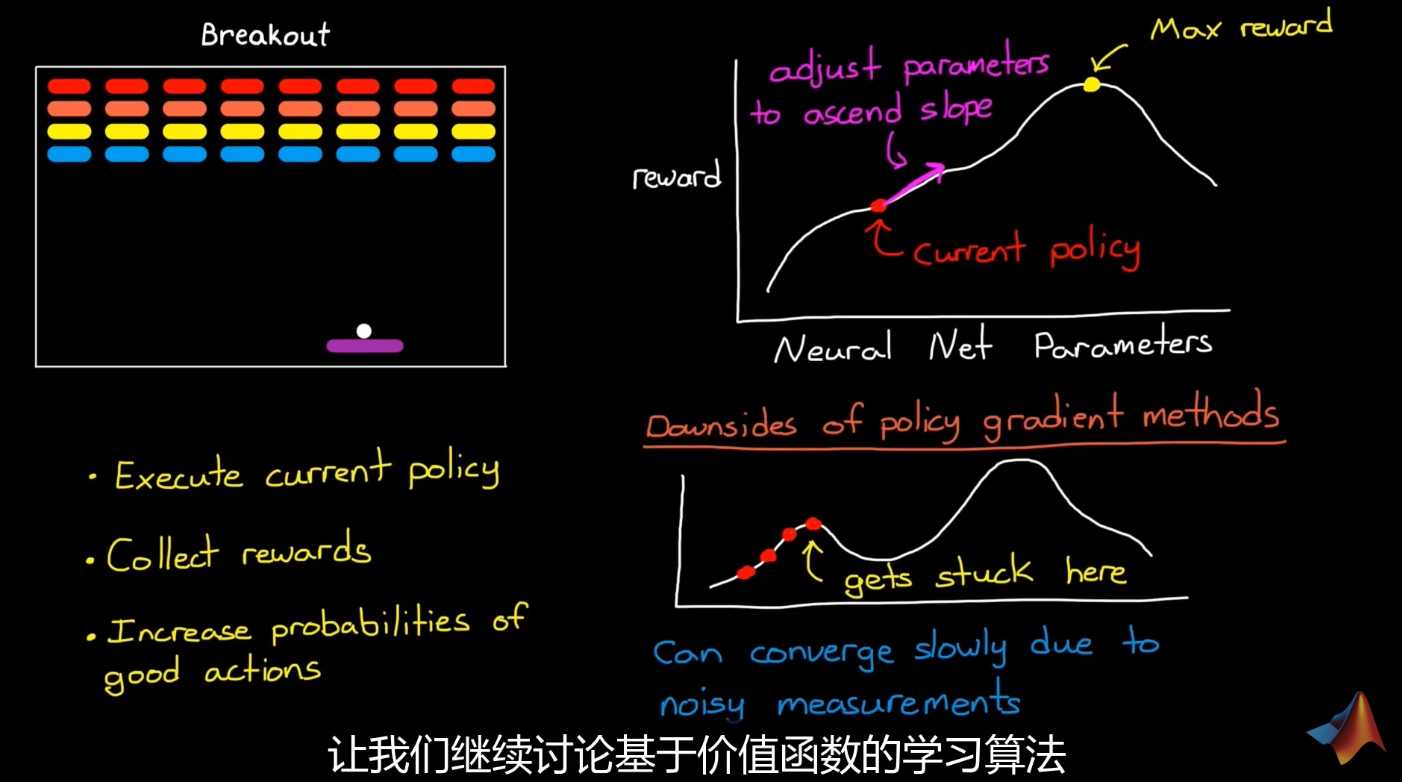
缺点:
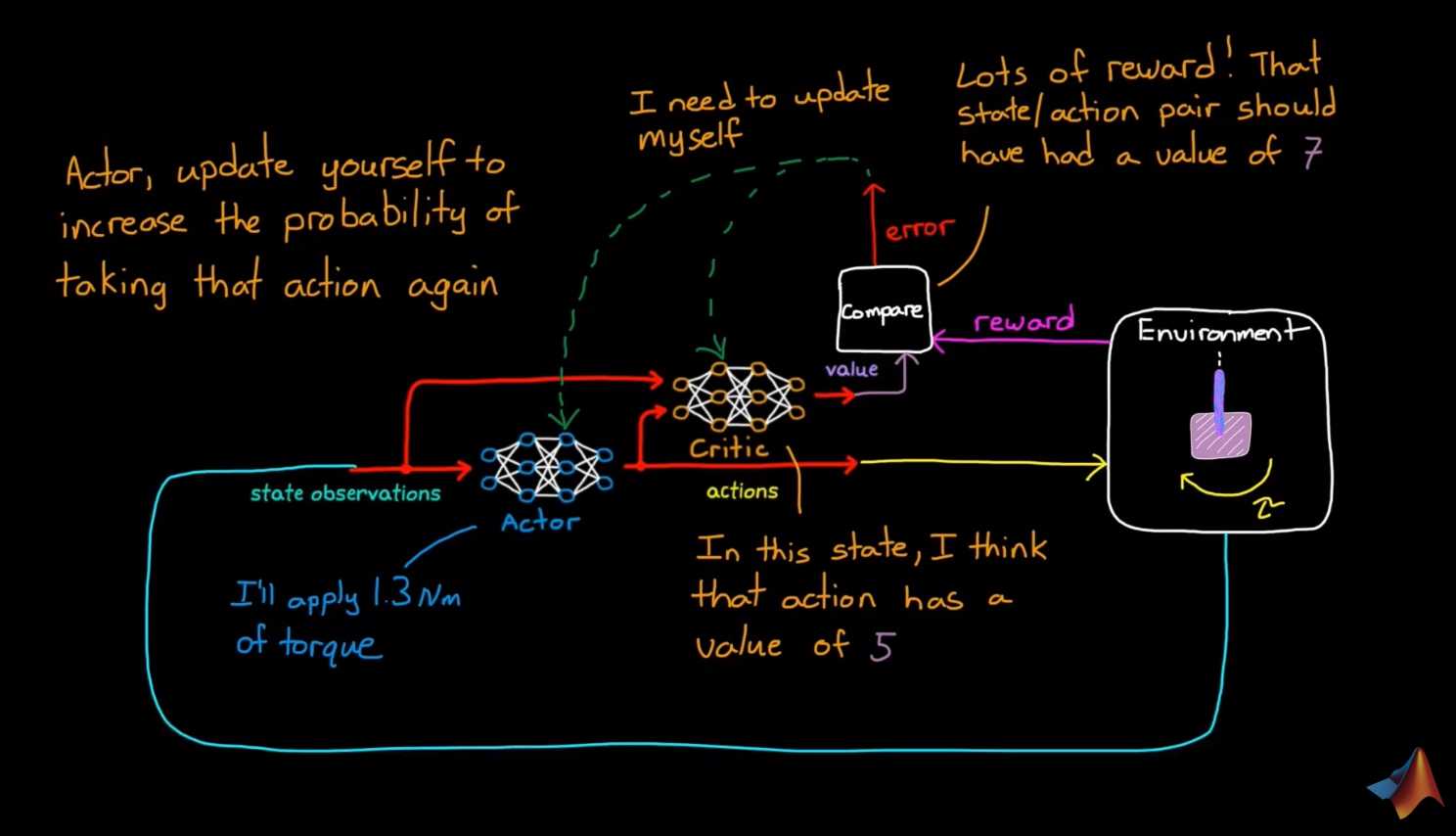
crictic评价网络
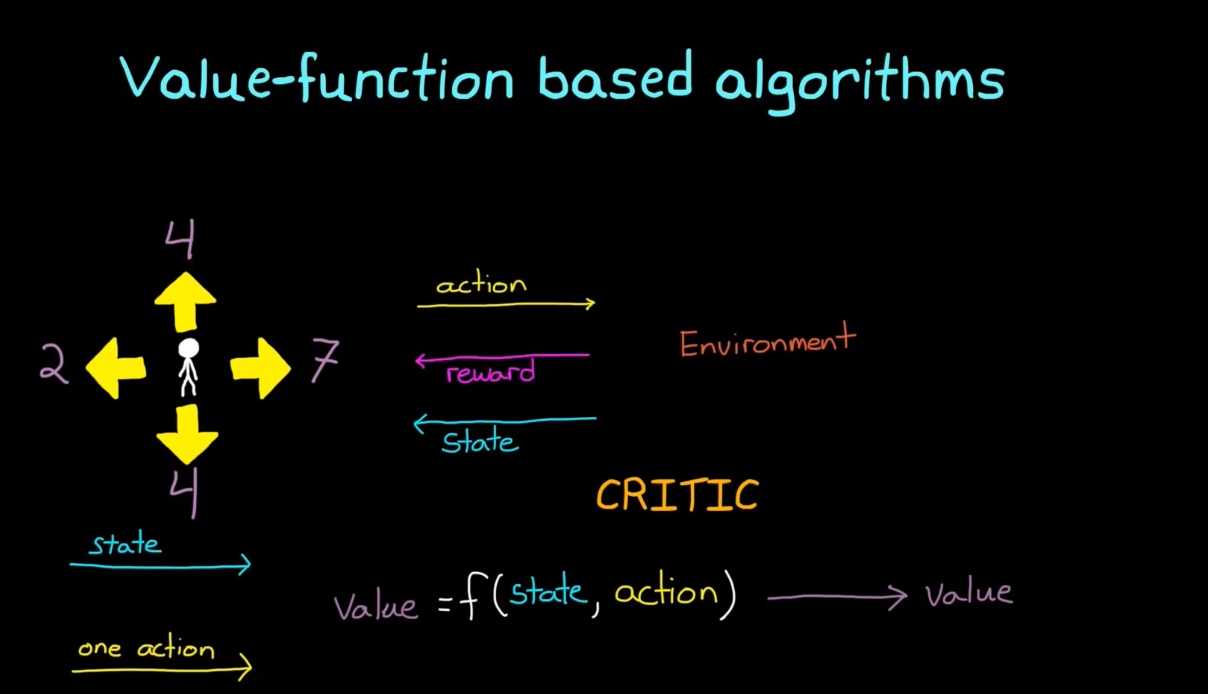
图中有两个网络:actor、critic
actor:根据policy给出最大概率下的action
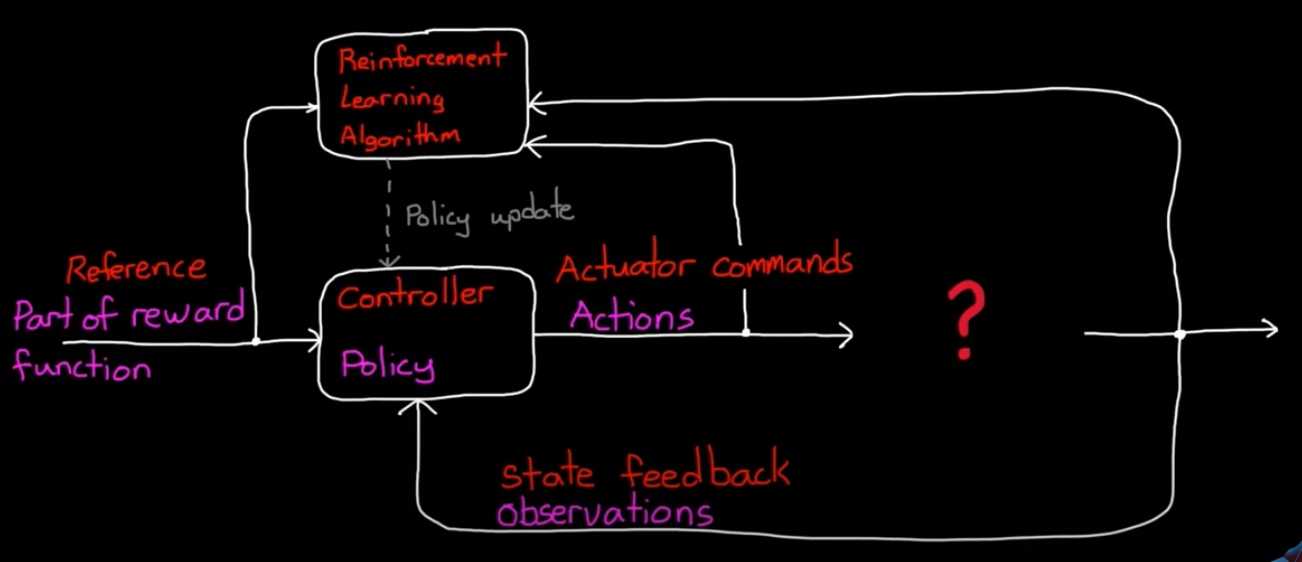
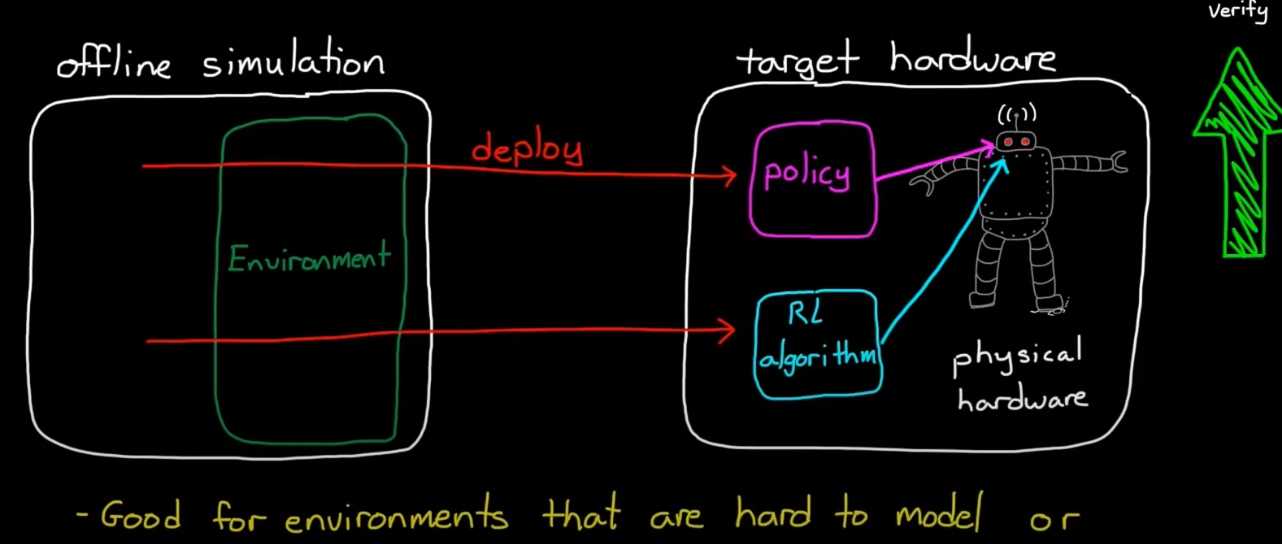
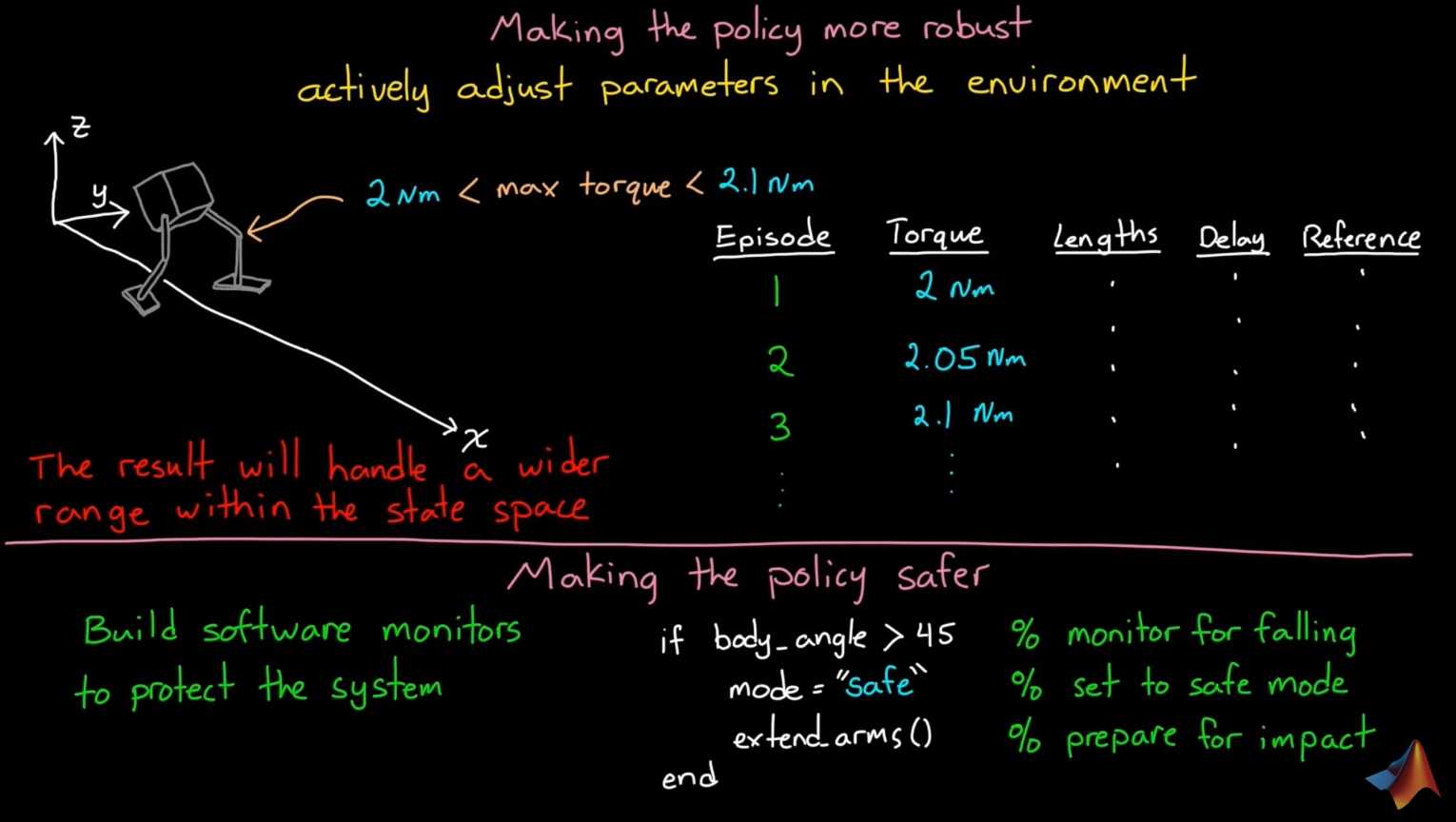
完成离线仿真和学习之后,将policy部署到硬件
RL algorithm学习能力对于适应不确定干扰和缓变环境尤为重要
while True: ?a = actor.choose_action(s)
s_,r,done,info = env.step(a)
td_error = critic.learn(s,r,s_)
actor.learn(s,a,td_error)
s = s_
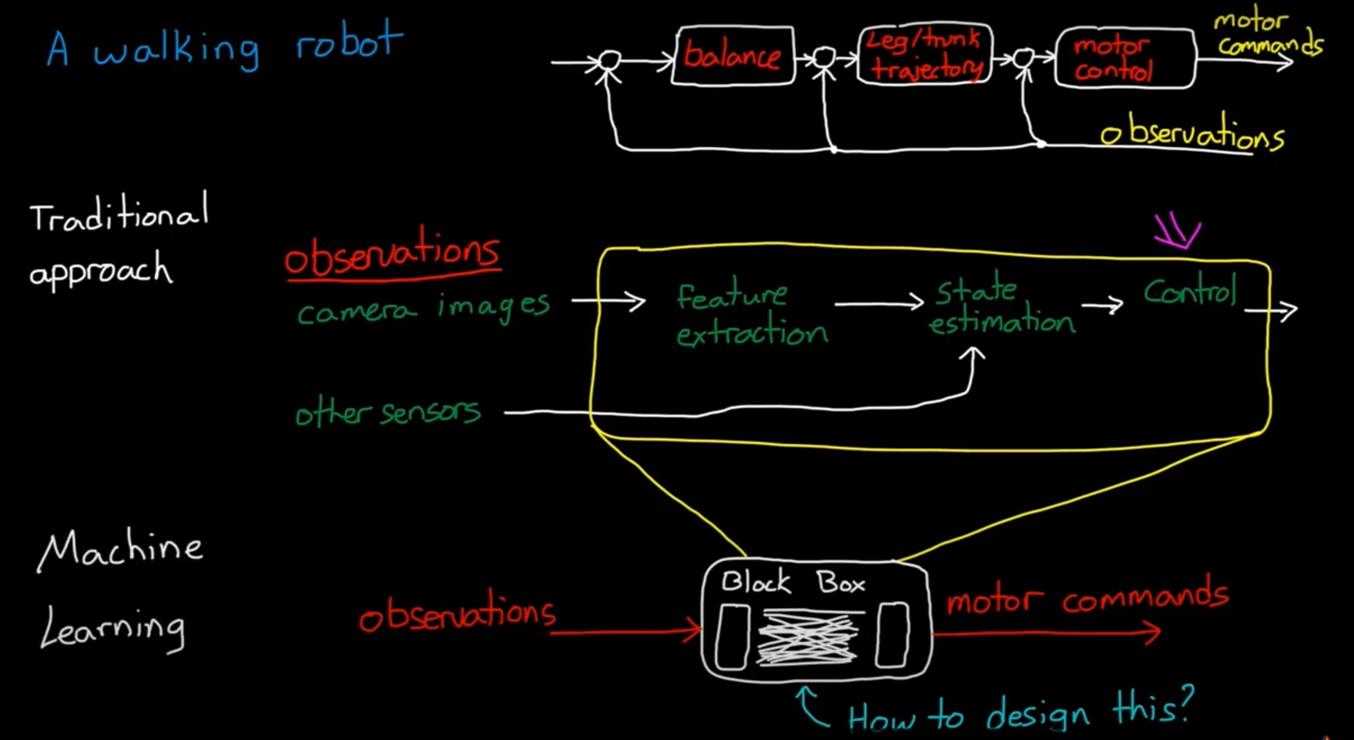
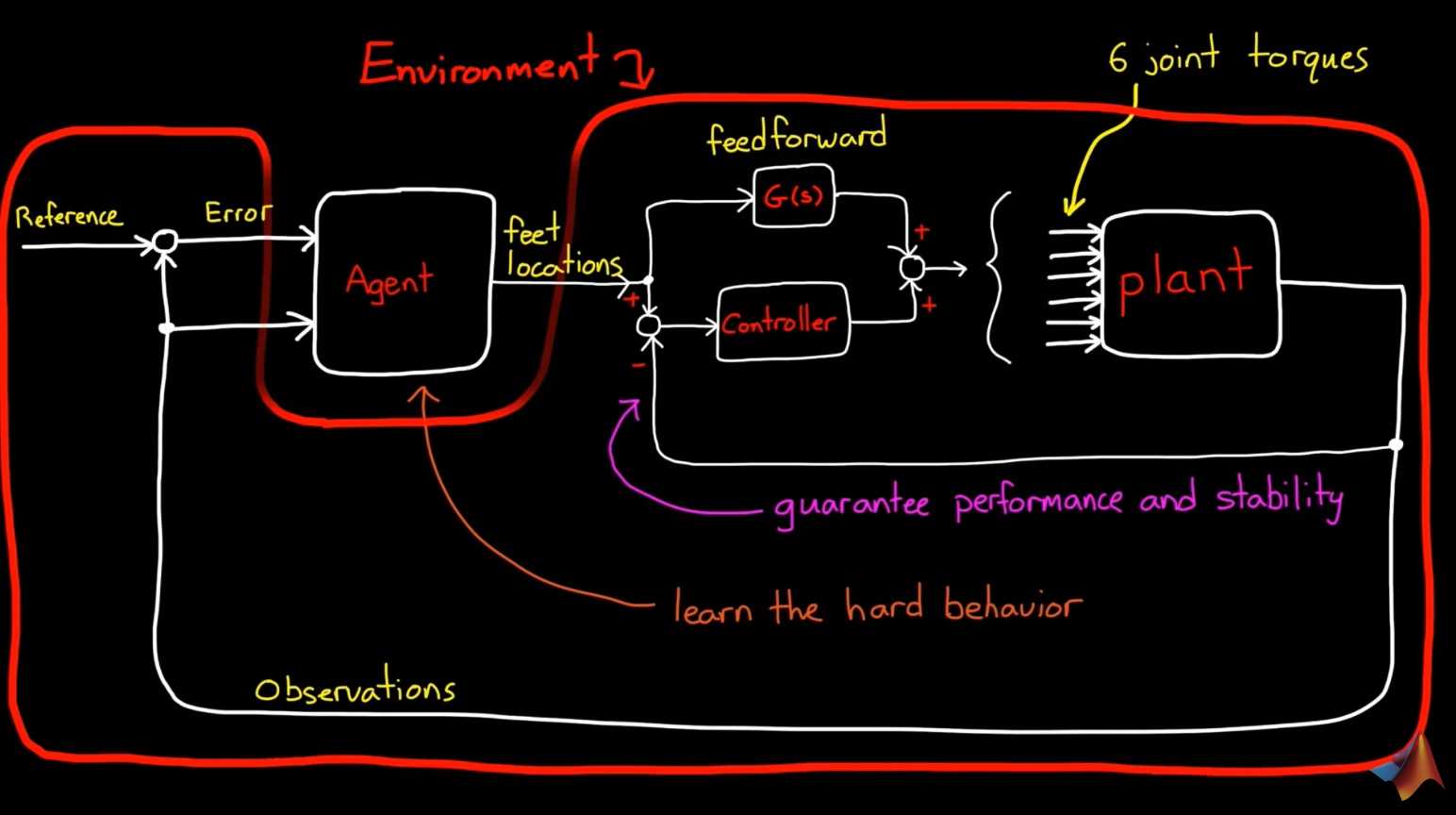
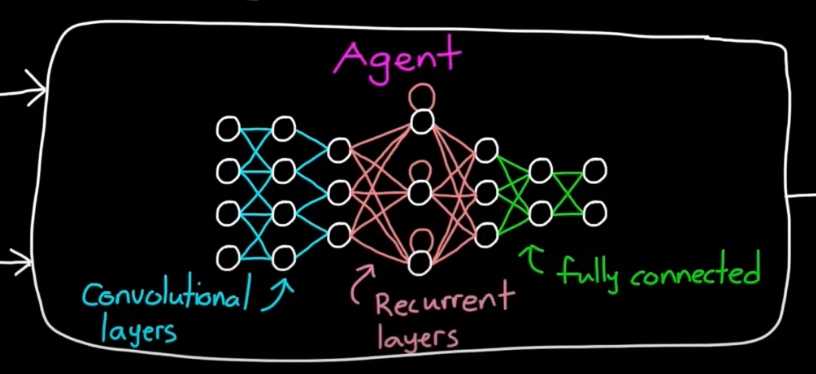
将RL-agent用于高级任务,低级任务交给
加入视觉、雷达等传感器后,观测量维数暴增,全连接层不管用
鲁棒性、安全性、可变性、可验证性
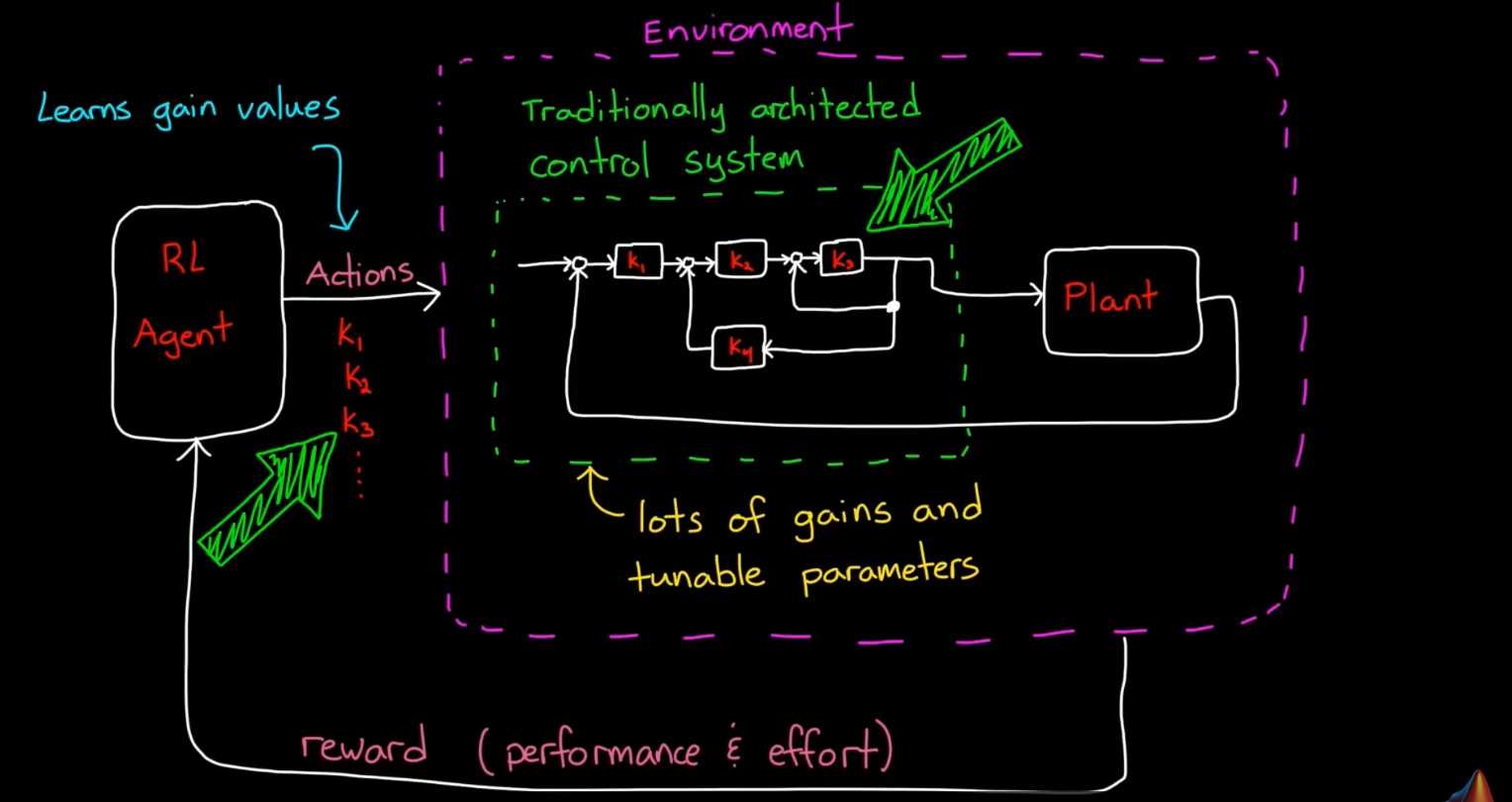
优点:结构可解释, 验证性强
缺点:结构人为设计,对于复杂输入,性能非最优
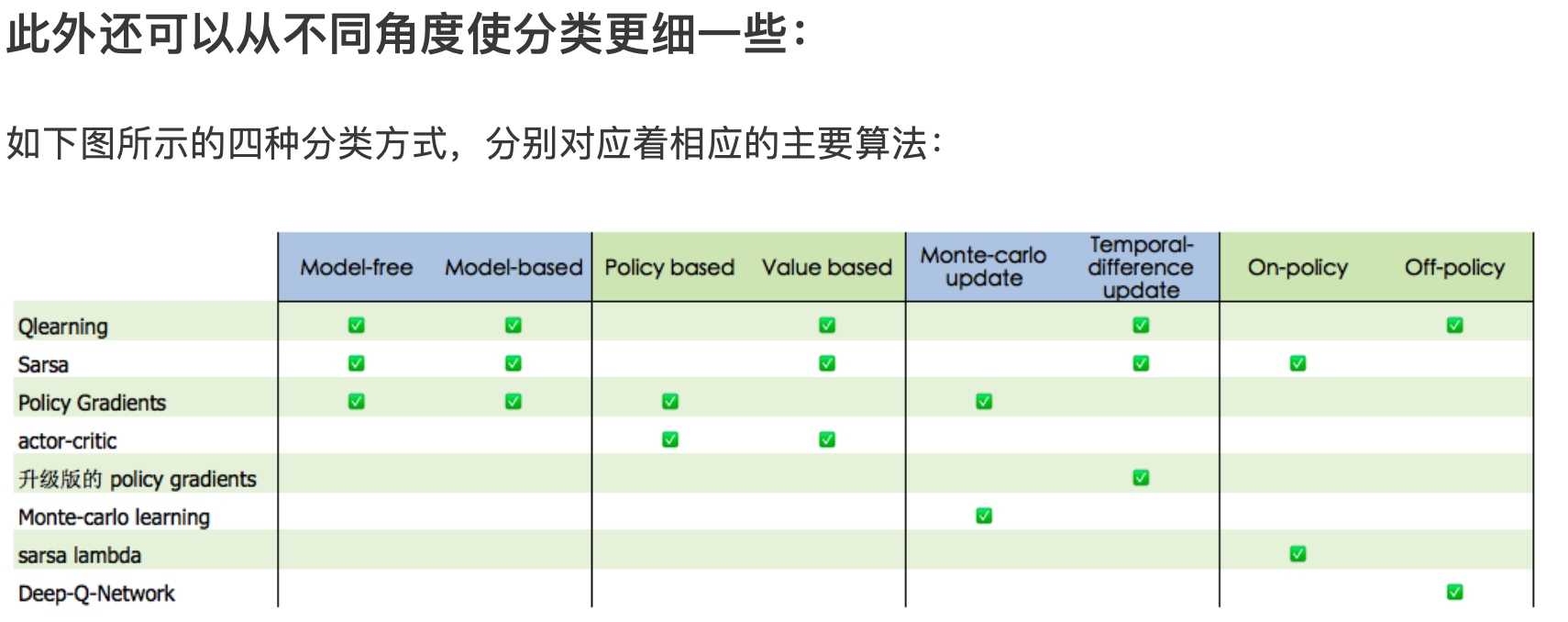
Model-free:不尝试去理解环境, 环境给什么就是什么,一步一步等待真实世界的反馈, 再根据反馈采取下一步行动。
Model-based:先理解真实世界是怎样的, 并建立一个模型来模拟现实世界的反馈,通过想象来预判断接下来将要发生的所有情况,然后选择这些想象情况中最好的那种,并依据这种情况来采取下一步的策略。它比 Model-free 多出了一个虚拟环境,还有想象力。
Policy based:通过感官分析所处的环境, 直接输出下一步要采取的各种动作的概率, 然后根据概率采取行动。
Value based:输出的是所有动作的价值, 根据最高价值来选动作,这类方法不能选取连续的动作。
Monte-carlo update:游戏开始后, 要等待游戏结束, 然后再总结这一回合中的所有转折点, 再更新行为准则。
Temporal-difference update:在游戏进行中每一步都在更新, 不用等待游戏的结束, 这样就能边玩边学习了。
On-policy:必须本人在场, 并且一定是本人边玩边学习。
Off-policy:可以选择自己玩, 也可以选择看着别人玩, 通过看别人玩来学习别人的行为准则。
标签:部署 war mon verify 缺点 就是 交互 探索 动作
原文地址:https://www.cnblogs.com/tolshao/p/qiang-hua-xue-xi.html