标签:alc around orm ini ade iso could not png 工程路径
在安装好的OpenCV的文件夹下,有相关的文件。具体位置看各人的安装路径,但大体上路径如下:***\opencv\sources\samples\cpp。
如“彩色目标跟踪”:Camshift
“光流”:optical flow
“点跟踪”:lkdemo
“人脸识别”:objectDetection
“支持向量机引导”:CvSVM::train
在上一级目录中可以发现,除了CPP之外,还有其他语言的,如java,Python等。
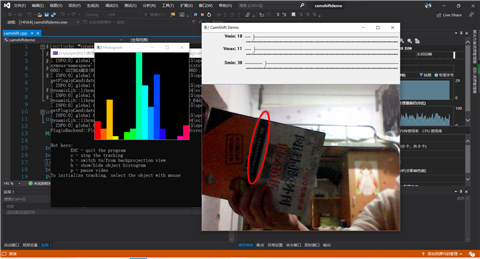
2.1 camshiftdemo

#include "opencv2/core/utility.hpp" #include "opencv2/video/tracking.hpp" #include "opencv2/imgproc.hpp" #include "opencv2/videoio.hpp" #include "opencv2/highgui.hpp" #include <iostream> #include <ctype.h> using namespace cv; using namespace std; Mat image; bool backprojMode = false; bool selectObject = false; int trackObject = 0; bool showHist = true; Point origin; Rect selection; int vmin = 10, vmax = 256, smin = 30; // User draws box around object to track. This triggers CAMShift to start tracking static void onMouse(int event, int x, int y, int, void*) { if (selectObject) { selection.x = MIN(x, origin.x); selection.y = MIN(y, origin.y); selection.width = std::abs(x - origin.x); selection.height = std::abs(y - origin.y); selection &= Rect(0, 0, image.cols, image.rows); } switch (event) { case EVENT_LBUTTONDOWN: origin = Point(x, y); selection = Rect(x, y, 0, 0); selectObject = true; break; case EVENT_LBUTTONUP: selectObject = false; if (selection.width > 0 && selection.height > 0) trackObject = -1; // Set up CAMShift properties in main() loop break; } } string hot_keys = "\n\nHot keys: \n" "\tESC - quit the program\n" "\tc - stop the tracking\n" "\tb - switch to/from backprojection view\n" "\th - show/hide object histogram\n" "\tp - pause video\n" "To initialize tracking, select the object with mouse\n"; static void help(const char** argv) { cout << "\nThis is a demo that shows mean-shift based tracking\n" "You select a color objects such as your face and it tracks it.\n" "This reads from video camera (0 by default, or the camera number the user enters\n" "Usage: \n\t"; cout << argv[0] << " [camera number]\n"; cout << hot_keys; } const char* keys = { "{help h | | show help message}{@camera_number| 0 | camera number}" }; int main(int argc, const char** argv) { VideoCapture cap; Rect trackWindow; int hsize = 16; float hranges[] = { 0,180 }; const float* phranges = hranges; CommandLineParser parser(argc, argv, keys); if (parser.has("help")) { help(argv); return 0; } int camNum = parser.get<int>(0); cap.open(camNum); if (!cap.isOpened()) { help(argv); cout << "***Could not initialize capturing...***\n"; cout << "Current parameter‘s value: \n"; parser.printMessage(); return -1; } cout << hot_keys; namedWindow("Histogram", 0); namedWindow("CamShift Demo", 0); setMouseCallback("CamShift Demo", onMouse, 0); createTrackbar("Vmin", "CamShift Demo", &vmin, 256, 0); createTrackbar("Vmax", "CamShift Demo", &vmax, 256, 0); createTrackbar("Smin", "CamShift Demo", &smin, 256, 0); Mat frame, hsv, hue, mask, hist, histimg = Mat::zeros(200, 320, CV_8UC3), backproj; bool paused = false; for (;;) { if (!paused) { cap >> frame; if (frame.empty()) break; } frame.copyTo(image); if (!paused) { cvtColor(image, hsv, COLOR_BGR2HSV); if (trackObject) { int _vmin = vmin, _vmax = vmax; inRange(hsv, Scalar(0, smin, MIN(_vmin, _vmax)), Scalar(180, 256, MAX(_vmin, _vmax)), mask); int ch[] = { 0, 0 }; hue.create(hsv.size(), hsv.depth()); mixChannels(&hsv, 1, &hue, 1, ch, 1); if (trackObject < 0) { // Object has been selected by user, set up CAMShift search properties once Mat roi(hue, selection), maskroi(mask, selection); calcHist(&roi, 1, 0, maskroi, hist, 1, &hsize, &phranges); normalize(hist, hist, 0, 255, NORM_MINMAX); trackWindow = selection; trackObject = 1; // Don‘t set up again, unless user selects new ROI histimg = Scalar::all(0); int binW = histimg.cols / hsize; Mat buf(1, hsize, CV_8UC3); for (int i = 0; i < hsize; i++) buf.at<Vec3b>(i) = Vec3b(saturate_cast<uchar>(i * 180. / hsize), 255, 255); cvtColor(buf, buf, COLOR_HSV2BGR); for (int i = 0; i < hsize; i++) { int val = saturate_cast<int>(hist.at<float>(i) * histimg.rows / 255); rectangle(histimg, Point(i * binW, histimg.rows), Point((i + 1) * binW, histimg.rows - val), Scalar(buf.at<Vec3b>(i)), -1, 8); } } // Perform CAMShift calcBackProject(&hue, 1, 0, hist, backproj, &phranges); backproj &= mask; RotatedRect trackBox = CamShift(backproj, trackWindow, TermCriteria(TermCriteria::EPS | TermCriteria::COUNT, 10, 1)); if (trackWindow.area() <= 1) { int cols = backproj.cols, rows = backproj.rows, r = (MIN(cols, rows) + 5) / 6; trackWindow = Rect(trackWindow.x - r, trackWindow.y - r, trackWindow.x + r, trackWindow.y + r) & Rect(0, 0, cols, rows); } if (backprojMode) cvtColor(backproj, image, COLOR_GRAY2BGR); ellipse(image, trackBox, Scalar(0, 0, 255), 3, LINE_AA); } } else if (trackObject < 0) paused = false; if (selectObject && selection.width > 0 && selection.height > 0) { Mat roi(image, selection); bitwise_not(roi, roi); } imshow("CamShift Demo", image); imshow("Histogram", histimg); char c = (char)waitKey(10); if (c == 27) break; switch (c) { case ‘b‘: backprojMode = !backprojMode; break; case ‘c‘: trackObject = 0; histimg = Scalar::all(0); break; case ‘h‘: showHist = !showHist; if (!showHist) destroyWindow("Histogram"); else namedWindow("Histogram", 1); break; case ‘p‘: paused = !paused; break; default: ; } } return 0; }
运行示例:
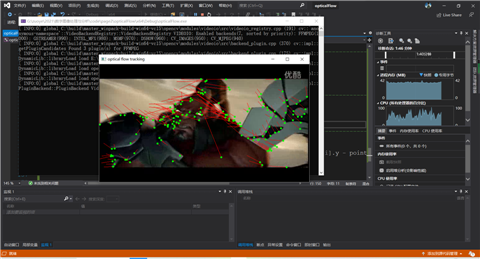
1.2 opticalFlow
//---------------------------------【头文件、命名空间包含部分】---------------------------- // 描述:包含程序所使用的头文件和命名空间 //------------------------------------------------------------------------------------------------- #include <opencv2/video/video.hpp> #include <opencv2/highgui/highgui.hpp> #include <opencv2/imgproc/imgproc.hpp> #include <opencv2/core/core.hpp> #include <iostream> #include <cstdio> using namespace std; using namespace cv; //-----------------------------------【全局函数声明】----------------------------------------- // 描述:声明全局函数 //------------------------------------------------------------------------------------------------- void tracking(Mat& frame, Mat& output); bool addNewPoints(); bool acceptTrackedPoint(int i); //-----------------------------------【全局变量声明】----------------------------------------- // 描述:声明全局变量 //------------------------------------------------------------------------------------------------- string window_name = "optical flow tracking"; Mat gray; // 当前图片 Mat gray_prev; // 预测图片 vector<Point2f> points[2]; // point0为特征点的原来位置,point1为特征点的新位置 vector<Point2f> initial; // 初始化跟踪点的位置 vector<Point2f> features; // 检测的特征 int maxCount = 500; // 检测的最大特征数 double qLevel = 0.01; // 特征检测的等级 double minDist = 10.0; // 两特征点之间的最小距离 vector<uchar> status; // 跟踪特征的状态,特征的流发现为1,否则为0 vector<float> err; //-----------------------------------【main( )函数】-------------------------------------------- // 描述:控制台应用程序的入口函数,我们的程序从这里开始 //------------------------------------------------------------------------------------------------- int main() { Mat frame; Mat result; VideoCapture capture("1.avi"); if (capture.isOpened()) // 摄像头读取文件开关 { while (true) { capture >> frame; if (!frame.empty()) { tracking(frame, result); } else { printf(" --(!) No captured frame -- Break!"); break; } int c = waitKey(50); if ((char)c == 27) { break; } } } return 0; } //------------------------------------------------------------------------------------------------- // function: tracking // brief: 跟踪 // parameter: frame 输入的视频帧 // output 有跟踪结果的视频帧 // return: void //------------------------------------------------------------------------------------------------- void tracking(Mat& frame, Mat& output) { //此句代码的OpenCV3版为: cvtColor(frame, gray, COLOR_BGR2GRAY); //此句代码的OpenCV2版为: //cvtColor(frame, gray, CV_BGR2GRAY); frame.copyTo(output); // 添加特征点 if (addNewPoints()) { goodFeaturesToTrack(gray, features, maxCount, qLevel, minDist); points[0].insert(points[0].end(), features.begin(), features.end()); initial.insert(initial.end(), features.begin(), features.end()); } if (gray_prev.empty()) { gray.copyTo(gray_prev); } // l-k光流法运动估计 calcOpticalFlowPyrLK(gray_prev, gray, points[0], points[1], status, err); // 去掉一些不好的特征点 int k = 0; for (size_t i = 0; i < points[1].size(); i++) { if (acceptTrackedPoint(i)) { initial[k] = initial[i]; points[1][k++] = points[1][i]; } } points[1].resize(k); initial.resize(k); // 显示特征点和运动轨迹 for (size_t i = 0; i < points[1].size(); i++) { line(output, initial[i], points[1][i], Scalar(0, 0, 255)); circle(output, points[1][i], 3, Scalar(0, 255, 0), -1); } // 把当前跟踪结果作为下一此参考 swap(points[1], points[0]); swap(gray_prev, gray); imshow(window_name, output); } //------------------------------------------------------------------------------------------------- // function: addNewPoints // brief: 检测新点是否应该被添加 // parameter: // return: 是否被添加标志 //------------------------------------------------------------------------------------------------- bool addNewPoints() { return points[0].size() <= 10; } //------------------------------------------------------------------------------------------------- // function: acceptTrackedPoint // brief: 决定哪些跟踪点被接受 // parameter: // return: //------------------------------------------------------------------------------------------------- bool acceptTrackedPoint(int i) { return status[i] && ((abs(points[0][i].x - points[1][i].x) + abs(points[0][i].y - points[1][i].y)) > 2); }
运行示例
2.3 lkdemo
#include "opencv2/video/tracking.hpp" #include "opencv2/imgproc.hpp" #include "opencv2/videoio.hpp" #include "opencv2/highgui.hpp" #include <iostream> #include <ctype.h> using namespace cv; using namespace std; static void help() { // print a welcome message, and the OpenCV version cout << "\nThis is a demo of Lukas-Kanade optical flow lkdemo(),\n" "Using OpenCV version " << CV_VERSION << endl; cout << "\nIt uses camera by default, but you can provide a path to video as an argument.\n"; cout << "\nHot keys: \n" "\tESC - quit the program\n" "\tr - auto-initialize tracking\n" "\tc - delete all the points\n" "\tn - switch the \"night\" mode on/off\n" "To add/remove a feature point click it\n" << endl; } Point2f point; bool addRemovePt = false; static void onMouse(int event, int x, int y, int /*flags*/, void* /*param*/) { if (event == EVENT_LBUTTONDOWN) { point = Point2f((float)x, (float)y); addRemovePt = true; } } int main(int argc, char** argv) { VideoCapture cap; TermCriteria termcrit(TermCriteria::COUNT | TermCriteria::EPS, 20, 0.03); Size subPixWinSize(10, 10), winSize(31, 31); const int MAX_COUNT = 500; bool needToInit = false; bool nightMode = false; help(); cv::CommandLineParser parser(argc, argv, "{@input|0|}"); string input = parser.get<string>("@input"); if (input.size() == 1 && isdigit(input[0])) cap.open(input[0] - ‘0‘); else cap.open(input); if (!cap.isOpened()) { cout << "Could not initialize capturing...\n"; return 0; } namedWindow("LK Demo", 1); setMouseCallback("LK Demo", onMouse, 0); Mat gray, prevGray, image, frame; vector<Point2f> points[2]; for (;;) { cap >> frame; if (frame.empty()) break; frame.copyTo(image); cvtColor(image, gray, COLOR_BGR2GRAY); if (nightMode) image = Scalar::all(0); if (needToInit) { // automatic initialization goodFeaturesToTrack(gray, points[1], MAX_COUNT, 0.01, 10, Mat(), 3, 3, 0, 0.04); cornerSubPix(gray, points[1], subPixWinSize, Size(-1, -1), termcrit); addRemovePt = false; } else if (!points[0].empty()) { vector<uchar> status; vector<float> err; if (prevGray.empty()) gray.copyTo(prevGray); calcOpticalFlowPyrLK(prevGray, gray, points[0], points[1], status, err, winSize, 3, termcrit, 0, 0.001); size_t i, k; for (i = k = 0; i < points[1].size(); i++) { if (addRemovePt) { if (norm(point - points[1][i]) <= 5) { addRemovePt = false; continue; } } if (!status[i]) continue; points[1][k++] = points[1][i]; circle(image, points[1][i], 3, Scalar(0, 255, 0), -1, 8); } points[1].resize(k); } if (addRemovePt && points[1].size() < (size_t)MAX_COUNT) { vector<Point2f> tmp; tmp.push_back(point); cornerSubPix(gray, tmp, winSize, Size(-1, -1), termcrit); points[1].push_back(tmp[0]); addRemovePt = false; } needToInit = false; imshow("LK Demo", image); char c = (char)waitKey(10); if (c == 27) break; switch (c) { case ‘r‘: needToInit = true; break; case ‘c‘: points[0].clear(); points[1].clear(); break; case ‘n‘: nightMode = !nightMode; break; } std::swap(points[1], points[0]); cv::swap(prevGray, gray); } return 0; }
运行示例
2.4 ObjectDetection
//---------------------------------【头文件、命名空间包含部分】---------------------------- // 描述:包含程序所使用的头文件和命名空间 //------------------------------------------------------------------------------------------------- #include "opencv2/objdetect/objdetect.hpp" #include "opencv2/highgui/highgui.hpp" #include "opencv2/imgproc/imgproc.hpp" #include <iostream> #include <stdio.h> using namespace std; using namespace cv; void detectAndDisplay(Mat frame); //--------------------------------【全局变量声明】---------------------------------------------- // 描述:声明全局变量 //------------------------------------------------------------------------------------------------- //注意,需要把"haarcascade_frontalface_alt.xml"和"haarcascade_eye_tree_eyeglasses.xml"这两个文件复制到工程路径下 String face_cascade_name = "haarcascade_frontalface_alt.xml"; String eyes_cascade_name = "haarcascade_eye_tree_eyeglasses.xml"; CascadeClassifier face_cascade; CascadeClassifier eyes_cascade; string window_name = "Capture - Face detection"; RNG rng(12345); //-----------------------------------【main( )函数】-------------------------------------------- // 描述:控制台应用程序的入口函数,我们的程序从这里开始 //------------------------------------------------------------------------------------------------- int main(void) { VideoCapture capture; Mat frame; //-- 1. 加载级联(cascades) if (!face_cascade.load(face_cascade_name)) { printf("--(!)Error loading\n"); return -1; }; if (!eyes_cascade.load(eyes_cascade_name)) { printf("--(!)Error loading\n"); return -1; }; //-- 2. 读取视频 capture.open(0); if (capture.isOpened()) { for (;;) { capture >> frame; //-- 3. 对当前帧使用分类器(Apply the classifier to the frame) if (!frame.empty()) { detectAndDisplay(frame); } else { printf(" --(!) No captured frame -- Break!"); break; } int c = waitKey(10); if ((char)c == ‘c‘) { break; } } } return 0; } void detectAndDisplay(Mat frame) { std::vector<Rect> faces; Mat frame_gray; cvtColor(frame, frame_gray, COLOR_BGR2GRAY); equalizeHist(frame_gray, frame_gray); //-- 人脸检测 //此句代码的OpenCV2版为: //face_cascade.detectMultiScale( frame_gray, faces, 1.1, 2, 0|CV_HAAR_SCALE_IMAGE, Size(30, 30) ); //此句代码的OpenCV3版为: face_cascade.detectMultiScale(frame_gray, faces, 1.1, 2, 0 | CASCADE_SCALE_IMAGE, Size(30, 30)); for (size_t i = 0; i < faces.size(); i++) { Point center(faces[i].x + faces[i].width / 2, faces[i].y + faces[i].height / 2); ellipse(frame, center, Size(faces[i].width / 2, faces[i].height / 2), 0, 0, 360, Scalar(255, 0, 255), 2, 8, 0); Mat faceROI = frame_gray(faces[i]); std::vector<Rect> eyes; //-- 在脸中检测眼睛 //此句代码的OpenCV2版为: // eyes_cascade.detectMultiScale( faceROI, eyes, 1.1, 2, 0 |CV_HAAR_SCALE_IMAGE, Size(30, 30) ); //此句代码的OpenCV3版为: eyes_cascade.detectMultiScale(faceROI, eyes, 1.1, 2, 0 | CASCADE_SCALE_IMAGE, Size(30, 30)); for (size_t j = 0; j < eyes.size(); j++) { Point eye_center(faces[i].x + eyes[j].x + eyes[j].width / 2, faces[i].y + eyes[j].y + eyes[j].height / 2); int radius = cvRound((eyes[j].width + eyes[j].height) * 0.25); circle(frame, eye_center, radius, Scalar(255, 0, 0), 3, 8, 0); } } //-- 显示最终效果图 imshow(window_name, frame); }
运行示例:(已打码!)
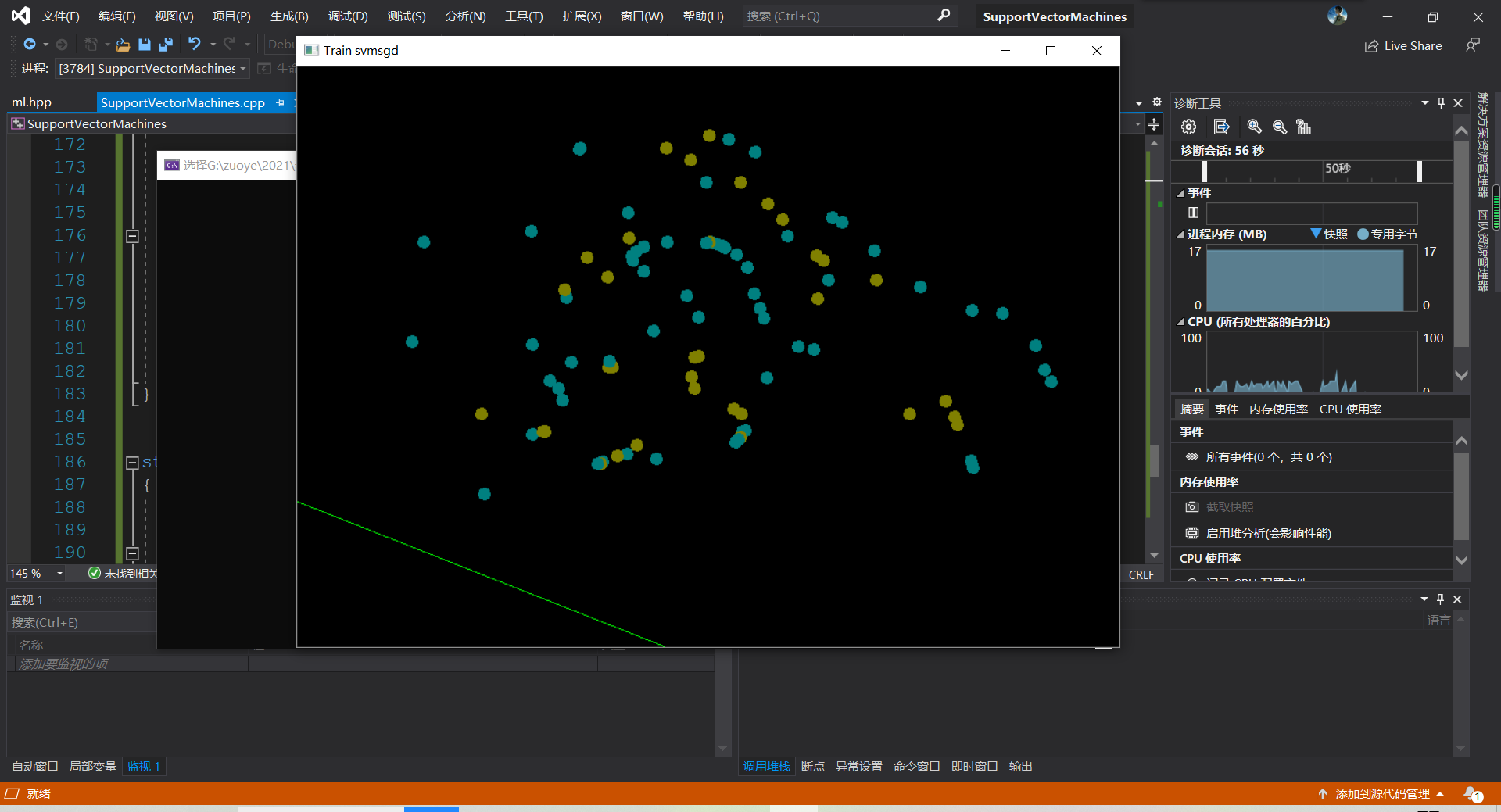
2.5 train_svmgd
#include "opencv2/core.hpp" #include "opencv2/video/tracking.hpp" #include "opencv2/imgproc.hpp" #include "opencv2/highgui.hpp" #include "opencv2/ml.hpp" using namespace cv; using namespace cv::ml; struct Data { Mat img; Mat samples; //Set of train samples. Contains points on image Mat responses; //Set of responses for train samples Data() { const int WIDTH = 841; const int HEIGHT = 594; img = Mat::zeros(HEIGHT, WIDTH, CV_8UC3); imshow("Train svmsgd", img); } }; //Train with SVMSGD algorithm //(samples, responses) is a train set //weights is a required vector for decision function of SVMSGD algorithm bool doTrain(const Mat samples, const Mat responses, Mat& weights, float& shift); //function finds two points for drawing line (wx = 0) bool findPointsForLine(const Mat& weights, float shift, Point points[], int width, int height); // function finds cross point of line (wx = 0) and segment ( (y = HEIGHT, 0 <= x <= WIDTH) or (x = WIDTH, 0 <= y <= HEIGHT) ) bool findCrossPointWithBorders(const Mat& weights, float shift, const std::pair<Point, Point>& segment, Point& crossPoint); //segments‘ initialization ( (y = HEIGHT, 0 <= x <= WIDTH) and (x = WIDTH, 0 <= y <= HEIGHT) ) void fillSegments(std::vector<std::pair<Point, Point> >& segments, int width, int height); //redraw points‘ set and line (wx = 0) void redraw(Data data, const Point points[2]); //add point in train set, train SVMSGD algorithm and draw results on image void addPointRetrainAndRedraw(Data& data, int x, int y, int response); bool doTrain(const Mat samples, const Mat responses, Mat& weights, float& shift) { cv::Ptr<SVMSGD> svmsgd = SVMSGD::create(); cv::Ptr<TrainData> trainData = TrainData::create(samples, cv::ml::ROW_SAMPLE, responses); svmsgd->train(trainData); if (svmsgd->isTrained()) { weights = svmsgd->getWeights(); shift = svmsgd->getShift(); return true; } return false; } void fillSegments(std::vector<std::pair<Point, Point> >& segments, int width, int height) { std::pair<Point, Point> currentSegment; currentSegment.first = Point(width, 0); currentSegment.second = Point(width, height); segments.push_back(currentSegment); currentSegment.first = Point(0, height); currentSegment.second = Point(width, height); segments.push_back(currentSegment); currentSegment.first = Point(0, 0); currentSegment.second = Point(width, 0); segments.push_back(currentSegment); currentSegment.first = Point(0, 0); currentSegment.second = Point(0, height); segments.push_back(currentSegment); } bool findCrossPointWithBorders(const Mat& weights, float shift, const std::pair<Point, Point>& segment, Point& crossPoint) { int x = 0; int y = 0; int xMin = std::min(segment.first.x, segment.second.x); int xMax = std::max(segment.first.x, segment.second.x); int yMin = std::min(segment.first.y, segment.second.y); int yMax = std::max(segment.first.y, segment.second.y); CV_Assert(weights.type() == CV_32FC1); CV_Assert(xMin == xMax || yMin == yMax); if (xMin == xMax && weights.at<float>(1) != 0) { x = xMin; y = static_cast<int>(std::floor(-(weights.at<float>(0) * x + shift) / weights.at<float>(1))); if (y >= yMin && y <= yMax) { crossPoint.x = x; crossPoint.y = y; return true; } } else if (yMin == yMax && weights.at<float>(0) != 0) { y = yMin; x = static_cast<int>(std::floor(-(weights.at<float>(1) * y + shift) / weights.at<float>(0))); if (x >= xMin && x <= xMax) { crossPoint.x = x; crossPoint.y = y; return true; } } return false; } bool findPointsForLine(const Mat& weights, float shift, Point points[2], int width, int height) { if (weights.empty()) { return false; } int foundPointsCount = 0; std::vector<std::pair<Point, Point> > segments; fillSegments(segments, width, height); for (uint i = 0; i < segments.size(); i++) { if (findCrossPointWithBorders(weights, shift, segments[i], points[foundPointsCount])) foundPointsCount++; if (foundPointsCount >= 2) break; } return true; } void redraw(Data data, const Point points[2]) { data.img.setTo(0); Point center; int radius = 3; Scalar color; CV_Assert((data.samples.type() == CV_32FC1) && (data.responses.type() == CV_32FC1)); for (int i = 0; i < data.samples.rows; i++) { center.x = static_cast<int>(data.samples.at<float>(i, 0)); center.y = static_cast<int>(data.samples.at<float>(i, 1)); color = (data.responses.at<float>(i) > 0) ? Scalar(128, 128, 0) : Scalar(0, 128, 128); circle(data.img, center, radius, color, 5); } line(data.img, points[0], points[1], cv::Scalar(1, 255, 1)); imshow("Train svmsgd", data.img); } void addPointRetrainAndRedraw(Data& data, int x, int y, int response) { Mat currentSample(1, 2, CV_32FC1); currentSample.at<float>(0, 0) = (float)x; currentSample.at<float>(0, 1) = (float)y; data.samples.push_back(currentSample); data.responses.push_back(static_cast<float>(response)); Mat weights(1, 2, CV_32FC1); float shift = 0; if (doTrain(data.samples, data.responses, weights, shift)) { Point points[2]; findPointsForLine(weights, shift, points, data.img.cols, data.img.rows); redraw(data, points); } } static void onMouse(int event, int x, int y, int, void* pData) { Data& data = *(Data*)pData; switch (event) { case EVENT_LBUTTONUP: addPointRetrainAndRedraw(data, x, y, 1); break; case EVENT_RBUTTONDOWN: addPointRetrainAndRedraw(data, x, y, -1); break; } } int main() { Data data; setMouseCallback("Train svmsgd", onMouse, &data); waitKey(); return 0; }
运行实例
右键黄点,左键蓝点
[1] OpenCV4的官方实例.
[2] 毛星云.OpenCV3编程入门[M].电子工业出版社.北京.2015.2.
标签:alc around orm ini ade iso could not png 工程路径
原文地址:https://www.cnblogs.com/jianle23/p/13774293.html
