标签:
卡尔曼滤波学习了有4天时间,现在网上流传的主要有两个,一个是二阶的卡尔曼滤波,用于陀螺仪和加速度计的数据融合;另一个是一阶的卡尔曼滤波用于对AD数据滤波。
学习卡尔曼的过程中学习了Matlab, 复习了以前一些数学知识。
附件1:一阶卡尔曼滤波
double KalmanFilter(const double ResrcData,
double ProcessNiose_Q,double MeasureNoise_R,double InitialPrediction)
{
double R = MeasureNoise_R;
double Q = ProcessNiose_Q;
static double x_last;
double x_mid = x_last;
double x_now;
static double p_last;
double p_mid ;
double p_now;
double kg;
x_mid=x_last; //x_last=x(k-1|k-1),x_mid=x(k|k-1)
p_mid=p_last+Q; //p_mid=p(k|k-1),p_last=p(k-1|k-1),Q=ÔëÉù
kg=p_mid/(p_mid+R); //kgΪkalman filter£¬RΪÔëÉù
x_now=x_mid+kg*(ResrcData-x_mid);//¹À¼Æ³öµÄ×îÓÅÖµ
p_now=(1-kg)*p_mid;//×îÓÅÖµ¶ÔÓ¦µÄcovariance
p_last = p_now; //¸üÐÂcovarianceÖµ
x_last = x_now; //¸üÐÂϵͳ״ֵ̬
return x_now;
}
附件二:二阶卡尔曼滤波
static float angle, angle_dot; //外部需要引用的变量
//-------------------------------------------------------
static const float Q_angle=0.001, Q_gyro=0.003, R_angle=0.5, dt=0.01;
//注意:dt的取值为kalman滤波器采样时间;
static float P[2][2] = {
{ 1, 0 },
{ 0, 1 }
};
static float Pdot[4] ={0,0,0,0};
static const char C_0 = 1;
static float q_bias, angle_err, PCt_0, PCt_1, E, K_0, K_1, t_0, t_1;
//-------------------------------------------------------
void Kalman_Filter(float angle_m,float gyro_m) //gyro_m:gyro_measure
{
angle+=(gyro_m-q_bias) * dt;
Pdot[0]=Q_angle - P[0][1] - P[1][0];
Pdot[1]=- P[1][1];
Pdot[2]=- P[1][1];
Pdot[3]=Q_gyro;
P[0][0] += Pdot[0] * dt;
P[0][1] += Pdot[1] * dt;
P[1][0] += Pdot[2] * dt;
P[1][1] += Pdot[3] * dt;
angle_err = angle_m - angle;
PCt_0 = C_0 * P[0][0];
PCt_1 = C_0 * P[1][0];
E = R_angle + C_0 * PCt_0;
K_0 = PCt_0 / E;
K_1 = PCt_1 / E;
t_0 = PCt_0;
t_1 = C_0 * P[0][1];
P[0][0] -= K_0 * t_0;
P[0][1] -= K_0 * t_1;
P[1][0] -= K_1 * t_0;
P[1][1] -= K_1 * t_1;
angle += K_0 * angle_err;
q_bias += K_1 * angle_err;
angle_dot = gyro_m-q_bias;
}
附件三 Matlab仿真程序
clc;
clear
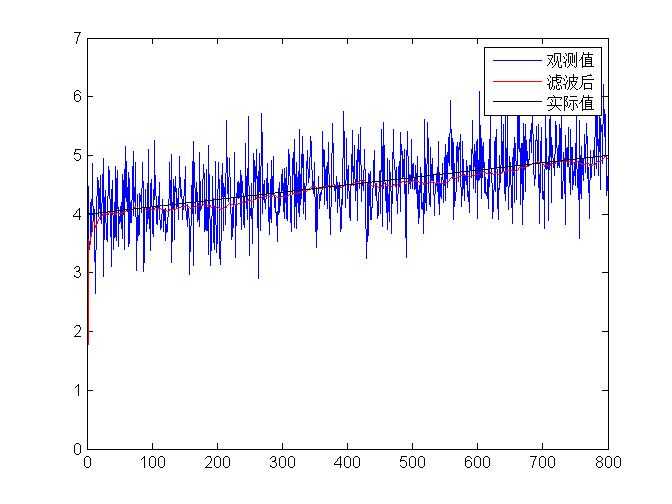
%%% 观测值 噪声 定义 比如超生波 噪声主要是观测噪声
N=800;
real=linspace(4,5,N);
z=real; % 观测值
w=0.5*randn(1,N); %观测噪声
z=z+w; % 加上观测噪声后的观测值
R=(std(w))^2; % 观测噪声的协方差
v=0.01*randn(1,N); % 定义过程噪声
Q=(std(v))^2; %由过程噪声求出协方差
%%% 变量初始化
p(1)=1;
x(1)=0;
%%% 卡尔曼滤波程序 其中A=1 U=0 H=1
for t=2:N;
x_(t)=x(t-1);
p_(t)=p(t-1)+Q;
k(t)=p_(t)/(p_(t)+R);
x(t)=x_(t)+k(t)*(z(t)-x_(t));
p(t)=(1-k(t))*p_(t);
end
t=1:N;
plot(t,z,‘b‘,t,x,‘r‘,t,real,‘k‘),legend(‘观测值‘,‘滤波后‘,‘实际值‘);
仿真波形:
标签:
原文地址:http://www.cnblogs.com/zwxwill/p/4328340.html