——基本布局及电源部份
上一章中,我们逻列出所有需要的零件,接下来就是我们开始拼装的时候了。电路图。。。 没有,
没有完整的,我们就一步步做吧,纯手工,焊到哪就是哪,不通了就飞线(注:正常电路从板子下面走,但如果实在有交叉过不去时,就可以在上面用一导线直接相联,叫飞线,正式design好的板子一般都不用飞的咯)。
虽说焊到哪是哪,但是还是得稍微布局设计一下。

观察一下小车,电机分布在两边,前面一轮子,后面空,
所以后面空地方肯定不能压重物,不然会压翻掉。
电路板100x150MM与车子底盘差不多大,但总不能直接帖着吧,开始动手:
在板子的四边上开始挖个洞,当然,自己得与底盘看一下,得对齐,然后每个洞接上一个六角铜柱:

好,完成后,应该是这样的:
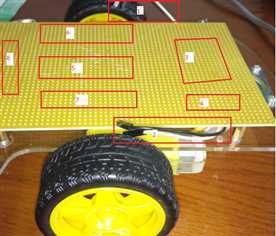
好了,电路板用小柱子顶起来,这样底部就不怕碰到什么短路了。其他部份,这样来分配:
买回来的小车,电机部份,是光光的两个接线柱,为了方便电路板拿下来,最好的办法就是,用杜邦线了,去掉一头后,接到电机上面,然后,在上图中,留下来1,2两个接线头,到时在电路板上留两个 ,就可以方便接上了。
,就可以方便接上了。
上面说的,需要重地放前面,所以我们把电池合就放在3这个位置。
于是在4这个位置,就得放一些开关,DC-DC之类的供电部份。
我们的主控芯片,是一个单片机,它来负责整个电路,所以就放在中心位置吧,5这个位置比较合式。
1,2是两个电机的接线头,那电机的驱动电路就靠近一点,就放在6,7位置,一边一个。
尾巴上,8的位置就放乘下的,比如蓝牙模块之类。
好了,这样一来,我们的功能元件好象都有指定的位置了。接下一就可以一点点往上焊了。
第一部份,当然就是供电咯,没有电,啥都运作不起来。
需求点:电当然得用充电电池,7号的肯定不行,电量不够,所以就先5号可充电池,单节1.2v。
单片机需要供电5v,电机供电3V到5V。
有了这些要求后,分析一下,如果用电池直接供单片机,则至少需要4节。但是电池当快没电时,电压是降的很快的,所以为了CPU稳定运行,最后电能撑到最后都是5V,所以得有一个稳定电路。
电机部份,想必3节电池即可,3.6V。
所以最终结论,这样来用3节5号充电池供电,
分两路,电机部份由电池直接供电,逻辑电路部份,由DC-DC升压至5v后供电。
上电路图:
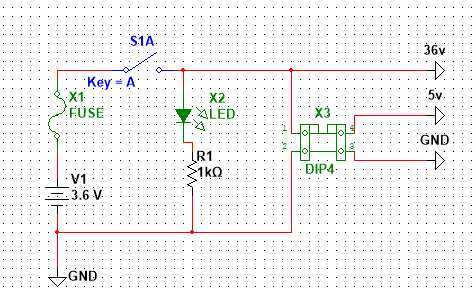
图中DIP4为DC-DC模块,输入,输出都是2个引脚,总4个脚。
实际电路焊接说明:

焊接时,先电池盒,如何固定?
原先电池盒上有两个洞,再其边上再挖上一个洞,然后零件上的脚很长的,于是可以弯一下,然后焊接上,这样的电池盒坚固无比。
看到电源中还有两个跳线帽子,那正是进入主电源的3.6v
5v的供电必经之路,跳线帽可以用于调试用,很方便地断掉某路电。
图中还有一个电位器,可以先不管,是试验证时为
提供称压3.2v用的,本根扩展使用USB接口,而USB处理芯片是3.2v的电源。此处先可不管。
然后把电池盒的引线再接上板子上,后面焊上。
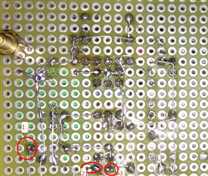
在反面焊接时,由于每个孔之间是不相联的,所以只能先焊牢,然后用零件多下来的脚,再横向焊接,以联通。
图中,1位置为供电了负极,2位置为电池正级即3.6v,3位置为DC-DC输出正极即5V。
接下来,有了电源部份,就可以向用电部份的零件上引过去了。