标签:com http 复杂 ati 需要 双线 参考 use cal
在这个公式中,w(x,y)是一个权重,表示在原始图像v中,像素 x 和像素 y 的相似度。这个权重要大于0,同时,权重的和为1,用公式表示是这样:

Ωx是像素 x 的邻域。这个公式可以这样理解:对于图像中的每一个像素 x ,去噪之后的结果等于它邻域中像素 y 的加权和,加权的权重等于 x 和 y的相似度。这个邻域也称为搜索区域,搜索区域越大,找到相似像素的机会也越大,但同时计算量也是成指数上升。在提出这个算法的文献中,这个区域是整幅图像!导致的结果是处理一幅512x512大小的图像,最少也得几分钟。
衡量像素相似度的方法有很多,最常用的是根据两个像素的亮度值的差的平方来估计(最小二乘万岁!)。但因为有噪声的存在,单独的一个像素并不可靠。对此解决方法是,考虑它们的邻域,只有邻域相似度高才能说这两个像素的相似度高。衡量两个图像块的相似度最常用的方法是计算他们之间的欧氏距离:
其中: n(x)是一个归一化的因子,是所有权重的和,对每个权重除以该因子后,使得权重满足和为1的条件。 h>0 是滤波系数,控制指数函数的衰减从而改变欧氏距离的权重。 V(x) 和 V(y) 代表了像素 x 和像素 y 的邻域,这个邻域常称为块(Patch)邻域。块邻域一般要小于搜索区域。![]() 是两个邻域的高斯加权欧式距离。其中 a>0是高斯核的标准差。在求欧式距离的时候,不同位置的像素的权重是不一样的,距离块的中心越近,权重越大,距离中心越远,权重越小,权重服从高斯分布。实际计算中考虑到计算量的问题,常常采用均匀分布的权重。
是两个邻域的高斯加权欧式距离。其中 a>0是高斯核的标准差。在求欧式距离的时候,不同位置的像素的权重是不一样的,距离块的中心越近,权重越大,距离中心越远,权重越小,权重服从高斯分布。实际计算中考虑到计算量的问题,常常采用均匀分布的权重。
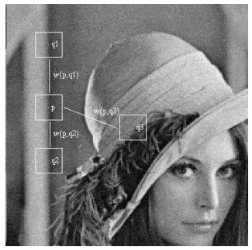
如上图所示,p为去噪的点,因为q1和q2的邻域与p相似,所以权重w(p,q1)和w(p,q2)比较大,而邻域相差比较大的点q3的权重值w(p,q3)很小。如果用一幅图把所有点的权重表示出来,那就得到下面这些权重图:

这6组图像中,左边是原图,中心的白色色块代表了像素x块邻域,右边是计算出来的权重 w(x,y)图,权重范围从0(黑色)到1(白色)。这个块邻域在整幅图像中移动,计算图像中其他区域跟这个块的相似度,相似度越高,得到的权重越大。最后将这些相似的像素值根据归一化之后的权重加权求和,得到的就是去噪之后的图像了。
这个算法参数的选择也有讲究,一般而言,考虑到算法复杂度,搜索区域大概取21x21,相似度比较的块的可以取7x7。实际中,常常需要根据噪声来选取合适的参数。当高斯噪声的标准差 σ 越大时,为了使算法鲁棒性更好,需要增大块区域,块区域增加同样也需要增加搜索区域。同时,滤波系数 h 与 σ 正相关:h=kσ,当块变大时,k需要适当减小。
NL-Means算法的复杂度跟图像的大小、颜色通道数、相似块的大小和搜索框的大小密切相关,设图像的大小为N×N,颜色通道数为Nc,块的大小为k×k,搜索框的大小为n×n,那么算法复杂度为:![]() (看着都可怕)。对512×512的彩色图像而言,设置k=7,n=21,OpenCV在使用了多线程的情况下,处理一幅图像所需要的时间需要几十秒。虽然有人不断基于这个算法进行改进、提速,但离实时处理还是比较远。
(看着都可怕)。对512×512的彩色图像而言,设置k=7,n=21,OpenCV在使用了多线程的情况下,处理一幅图像所需要的时间需要几十秒。虽然有人不断基于这个算法进行改进、提速,但离实时处理还是比较远。
(二)视频、连续处理方法
论文为 《Denoising image sequences does not require motion estimation》by A. Buades, B. Coll
//通用函数
void cv::fastNlMeansDenoising(
cv::InputArray src, // Input image 必须为U8
cv::OutputArray dst, // Output image
float h = 3, // Weight decay parameter
int templateWindowSize = 7, // Size of patches used for comparison
int searchWindowSize = 21 // Maximum patch distance to consider
);
//用于彩色
void cv::fastNlMeansDenoisingColored(
cv::InputArray src, // Input image 必须为U8C3
cv::OutputArray dst, // Output image
float h = 3, // Luminosity weight decay parameter
float hColor = 3, // Color weight decay parameter
int templateWindowSize = 7, // Size of patches used for comparison
int searchWindowSize = 21 // Maximum patch distance to consider
);
//用于视频,只对序列中抽取的图片进行denoiseing处理
void cv::fastNlMeansDenoisingMulti(
cv::InputArrayOfArrays srcImgs, // Sequence of several images
cv::OutputArray dst, // Output image
int imgToDenoiseIndex, // Index of image to denoise
int temporalWindowSize, // Num images to use (odd)
float h = 3, // Weight decay parameter
int templateWindowSize = 7, // Size of comparison patches
int searchWindowSize = 21 // Maximum patch distance
);
void cv::fastNlMeansDenoisingColoredMulti(
cv::InputArrayOfArrays srcImgs, // Sequence of several images
cv::OutputArray dst, // Output image
int imgToDenoiseIndex, // Index of image to denoise
int temporalWindowSize, // Num images to use (odd)
float h = 3, // Weight decay param
float hColor = 3, // Weight decay param for color
int templateWindowSize = 7, // Size of comparison patches
int searchWindowSize = 21 // Maximum patch distance
);标签:com http 复杂 ati 需要 双线 参考 use cal
原文地址:http://www.cnblogs.com/jsxyhelu/p/7080975.html