标签:快速 not provided 存在 port mapping reads ges 简单
Parallel Tracking and Verifying: A Framework for Real-Time and High Accuracy Visual Tracking
本文目标在于 tracking performance 和 efficiency 之间达到一种平衡。将 tracking 过程分解为两个并行但是相互协作的部分:
一个用于快速的跟踪(fast tracking);
另一个用于准确的验证(accurate verification)。
本文的 Motivation 主要是:
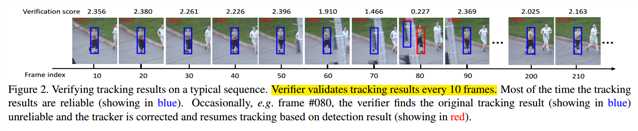
1. 大部分跟踪的序列,都是比较平坦简单的,但是存在有些非常具有挑战性的片段的存在,使得跟踪的结果不是非常的好。如果处理不好,还会导致跟踪的丢失。本文利用 verifiers 将进行这些关键点的处理。
2. 计算机视觉当中多线程计算已经非常普遍,特别是 SLAM。By splitting tracking and mapping into two parallel threads, PTAM (parallel tracking and mapping) [23] provides one of the most popular SLAM frameworks with many important extensions.
3. 最近快速、准确的跟踪算法提供了有效的 building blocks,并且鼓励我们去寻找组合的解决方法(呵呵了。。。)
创新点:
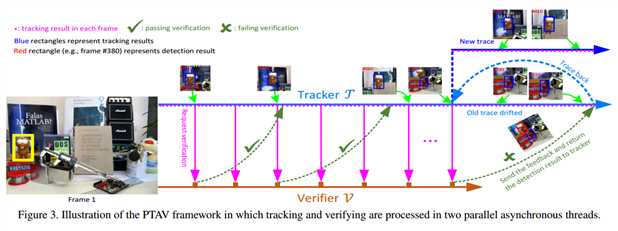
1. we propose to build real-time high accuracy trackers in a novel framework named parallel tracking and verifying (PTAV).
2. The key idea is : while T needs to run on every frame, V does not. As a general framework, PTAV allows the coordination between the tracker and the verifier: V checks the
tracking results provided by T and sends feedback to V; and V adjusts itself according to the feedback when necessary. By running T and V in parallel, PTAV inherits both the high
efficiency of T and the strong discriminative power of V.
============================================== 分割线 ==============================================
论文笔记:Parallel Tracking and Verifying: A Framework for Real-Time and High Accuracy Visual Tracking
标签:快速 not provided 存在 port mapping reads ges 简单
原文地址:http://www.cnblogs.com/wangxiaocvpr/p/7525354.html