标签:moni com http 获得 inux bubuko 静态 windows 7 人机交互
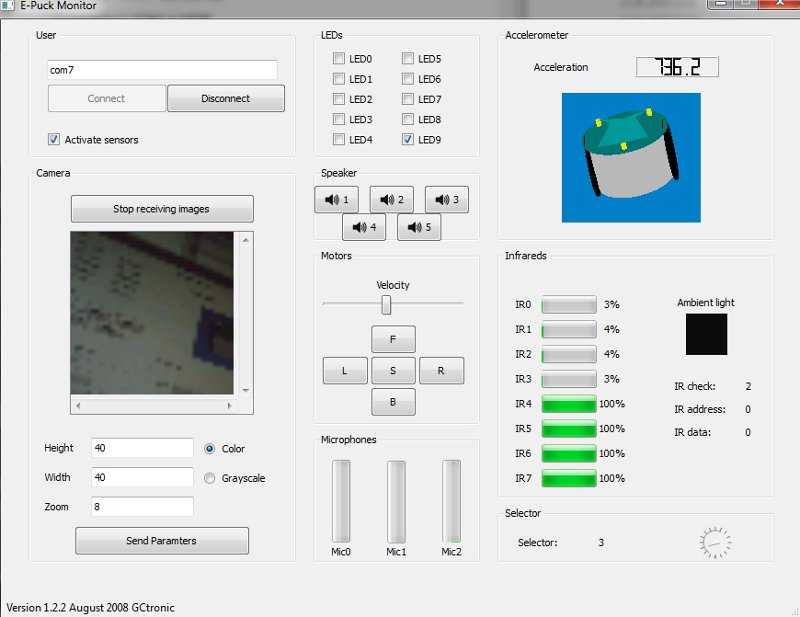
为了使用方便,E-PUCK团队开发了一个在计算机上运行并通过蓝牙连接到e-puck的接口,该接口基于先进的sercom协议(选择器3); 通过该界面,可以获得有关所有传感器的信息,接收摄像机图像并控制LED和电机。 源代码可从以下链接获得:
多平台版本3.0(Monitor3.0源代码); 该应用程序是一个Qt项目,因此可以使用Qt Creator轻松处理编译; 或者可以使用qmake。 以下可执行文件是动态编译的,因此必须在系统中安装Qt库(4.5.0或更高版本)才能运行它们:
由于最后一个版本包含e-puck的基本OpenGL表示,因此您还需要OpenGL扩展库来编译项目; 这些应该包含在Qt SDK中,基本上你需要手动下载OpenGL库:GLX(Linux),CGL(MacOS),WGL(Windows)。一旦项目动态构建,可能会出现一些关于丢失dll的错误; 其中一个缺少的库可能是mingwm10.dll, 其他的可能与Qt有关。 要解决此问题,您需要静态构建项目,或在系统上注册库,或手动将所有dll与可执行文件放在同一个文件夹下。
标签:moni com http 获得 inux bubuko 静态 windows 7 人机交互
原文地址:https://www.cnblogs.com/kay2018/p/9537201.html