标签:按键 ble splay err 大于等于 需要 == 获取 按键扫描
#include"reg52.h"//单片机头文件 #define uchar unsigned char//宏定义,用uchar表示unsigned char,叫无符号字符型数据类型,取值范围为:0到255。 #define uint unsigned int//宏定义,用uint表示unsigned int,叫无符号整数型数据类型,取值范围为:0到65535。 sbit qitingjian=P1^0;//位定义启停键 sbit zhengzhuan=P1^1;//位定义正转键 sbit fanzhuan=P1^2;//位定义反转键 sbit jiasujian=P1^3;//位定义加速键 sbit jiansujian=P1^4;//位定义减速键 sbit xuanze=P1^5;//位定义选择键 sbit IN1=P2^0;//位定义L298M芯片IN1端口 sbit IN2=P2^1;//位定义L298M芯片IN2端口 sbit IN3=P2^2;//位定义L298M芯片IN3端口 sbit IN4=P2^3;//位定义L298M芯片IN4端口 sbit ENA=P2^4;//位定义L298M芯片使能端ENA sbit ENB=P2^5;//位定义L298M芯片使能端ENB //sbit duan=P3^0;//位定义L298M芯片控制端IN1 //sbit wei=P3^1;//位定义L298M芯片控制端IN2 sbit qitingled=P3^4;//位定义启停指示灯 sbit zhengzhuanled=P3^5;//位定义正转指示灯 sbit fanzhuanled=P3^6;//位定义反转指示灯 sbit xuanzeled=P3^7;//位定义选择指示灯 uchar xuanzenum;//选择次数变量 uchar motor1flag;//电机1启动标志位变量 uchar motor2flag;//电机2启动标志位变量 uchar motor1_pwm_flag;//电机1脉冲宽度调制标志位变量 uchar motor2_pwm_flag;//电机2脉冲宽度调制标志位变量 //sbit waibuzhongduanling=P3^2; //外部中断0端口 //uint qian,bai,shi,ge,zhuansu;//数码管千位变量、百位变量、十位变量、个位变量以及转速变量 //uint maichongcount,Time0num,Time1num,pwm,qitingnum,zhengzhuanflag,fanzhuanflag;//脉冲计数变量、定时器0定时计数变量、定时器1定时计数变量、脉冲宽度调制变量、启停键按下数次变量、正转标志位变量、反转标志位变量 uint Time0num,pwm,qitingnum,zhengzhuanflag,fanzhuanflag;//定时器0定时计数变量、脉冲宽度调制变量、启停键按下数次变量、正转标志位变量、反转标志位变量 //uchar code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x27,0x7f,0x6f,0x40,0x7c,0x39,0x5e,0x79,0x71,0x00};//共阴数码管段码,高电平点亮段码,低电平熄灭段码。 //uchar code weima[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f,0xff};//共阴数码管位码,低电平点亮位码,高电平熄灭位码。 //void delay(uint jishi);//毫秒延时函数 //void TimerInit();//定时器初始化函数 //void Time0();//定时器0定时函数 //void Time1();//定时器1定时函数 //void KeyScan();//按键扫描函数 //void waibuzhongduanlingjishu();//外部中断0计数函数 //void shumaguandisplay(uint qian,uint bai,uint shi,uint ge);//数码管显示函数 //void shumaguannodisplay(uint qian,uint bai,uint shi,uint ge);//数码管无显示函数 void delay(uint jishi)//延时函数 { uint i,j; for(i=jishi;i>0;i--) for(j=110;j>0;j--); } void TimerInit()//定时器初始化函数 { TMOD=0x01;//设定定时器为定时器0和定时器1,工作模式都为1。 TH0=(65536-1000)/256;//TH0装初值为65536-1000=64536,即定时1000微妙,相当于1毫秒。 TL0=(65536-1000)%256;//TL0装初值为65536-1000=64536 // TH1=(65536-50000)/256;//TH1装初值为65536-50000=15536,即定时50000微妙,相当于50毫秒。 // TL1=(65536-50000)%256;//TL1装初值为65536-50000=15536 EA=1;//全局中断允许 ET0=1;//打开定时器0中断允许 TR0=0;//关定时器0 // EX0=1;//开外部中断0允许 // IT0=1;//设置外部中断0下降触发中断 // ET1=1;//打开定时器1中断允许 // TR1=1;//开定时器1 } void Time0() interrupt 1//定时器0定时函数,每1毫秒产生PWM波一次。 { TH0=(65536-1000)/256;//TH0重装初值为65536-1000=64536,即定时1000微妙,相当于1毫秒。 TL0=(65536-1000)%256;//TH0重装初值为65536-1000=64536 Time0num++;//定时器0定时计数变量先赋值再自加 if(motor1_pwm_flag==1&&motor2_pwm_flag==0) { if(Time0num==20)//判断定时器0定时计数变量是否大于等于20,PWM波完整周期为20ms,定时器0定时计数变量Time0num数值越大,电机运转越快。 { Time0num=0;//定时器0定时计数变量等于0 } if(Time0num<pwm)//判断定时器0定时计数变量还否小于脉冲宽度调制变量 { ENA=1;//L298M芯片使能端ENA置高电平,电机运转。 // zhuansuled=0;//开转速指示灯 } else { ENA=0;//L298M芯片使能端ENA置低电平,电机不运转。 // zhuansuled=1;//关转速指示灯 } } if(motor1_pwm_flag==0&&motor2_pwm_flag==1) { if(Time0num==20)//判断定时器0定时计数变量是否大于等于20,PWM波完整周期为20ms,定时器0定时计数变量Time0num数值越大,电机运转越快。 { Time0num=0;//定时器0定时计数变量等于0 } if(Time0num<pwm)//判断定时器0定时计数变量还否小于脉冲宽度调制变量 { ENB=1;//L298M芯片使能端ENA置高电平,电机运转。 // zhuansuled=0;//开转速指示灯 } else { ENB=0;//L298M芯片使能端ENA置低电平,电机不运转。 // zhuansuled=1;//关转速指示灯 } } } // void Time1() interrupt 3//定时器1定时函数,定时50ms,采集电机转速。 //{ // TH1=(65536-50000)/256;//TH1装初值为65536-50000=15536,即定时50000微妙,相当于50毫秒。 // TL1=(65536-50000)%256;//TH1装初值为65536-50000=15536 // Time1num++;//定时器1定时计数变量先赋值再自加 // if(Time1num==20)//判断定时器1定时计数变量是否等于20,即每1秒测速一次。 // { // Time1num=0;//定时器1定时计数变量等于0 // EX0=0;//关外部中断0 // zhuansu=55*maichongcount/24;//电机转速=每分钟X脉冲计数变量/每转一圈需要的脉冲个数,即55*maichongcount/24,其中的55表示55秒,为什么不是一分钟60秒?由于Protues仿真电路图中的MOTOR-ENCODER仿真件存在误差,为了让MOTOR-ENCODER仿真件显示的转速达到数码管显示转速的效果,进行了一定秒数的修改,不过实际运用要以一分钟60秒为准,maichongcount为单片机从外部中断0端口处获取MOTOR-ENCODER仿真件旋转生产的脉冲计数变量,24为MOTOR-ENCODER仿真件每旋转一圈产生的脉冲个数。 // qian=zhuansu/1000;//数码管千位显示 // bai=zhuansu%1000/100;//数码管百位显示 // shi=zhuansu%100/10;//数码管十位显示 // ge=zhuansu%10;//数码管个位显示 // maichongcount=0;//脉冲计数变量归零 // EX0=1;//开外部中断0 // } //} // void waibuzhongduanlingjishu() interrupt 0 using 1//外部中断0计数函数,外部脉冲计数。 //{ // maichongcount++ ;//脉冲计数变量先赋值再自加 // } void KeyScan()//按键扫描函数 { if(qitingjian==0)//判断启停键是否按下 { // shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时 delay(5); if(qitingjian==0)//再次判断启停键是否按下 { // shumaguandisplay(qian,bai,shi,ge);//数码管显示函数 qitingnum++;//启停键按下数次变量先赋值再加加 qitingled=0;//开启停指示灯 while(!qitingjian);//启停键释放 if(qitingnum==2)//判断启停键按下数次变量是否为2 { TR0=0; qitingnum=0;//启停键按下数次变量归零 xuanzenum=0;//选择次数变量清0 Time0num=0;//定时器0定时计数变量清0 pwm=0;//脉冲宽度调制变量清0 qitingled=1;//关启停指示灯 zhengzhuanled=1;//关正转指示灯 fanzhuanled=1;//关反转指示灯 xuanzeled=1;//关选择指示灯 zhengzhuanflag=0;//正转标志位变量为0 fanzhuanflag=0;//反转标志位变量为0 motor1flag=0;//电机1启动标志位变量置0 motor2flag=0;//电机2启动标志位变量置0 motor1_pwm_flag=0;//电机1脉冲宽度调制标志位变量 motor2_pwm_flag=0;//电机2脉冲宽度调制标志位变量 IN1=0;//L298M芯片控制端IN1置低电平,电机不运转。 IN2=0;//L298M芯片控制端IN2置低电平,电机不运转。 IN3=0;//L298M芯片控制端IN3置低电平,电机不运转。 IN4=0;//L298M芯片控制端IN4置低电平,电机不运转。 // shumaguannodisplay(qian,bai,shi,ge);//数码管无显示函数 } } } if(qitingnum==1)//判断启停键是否第一次按下 { if(xuanze==0)//判断选择键是否第一次按下 { delay(5); if(xuanze==0)//再次判断选择键是否按下 { TR0=1; xuanzeled=0;//选择指示灯 xuanzenum++;//选择次数变量自加 motor1flag=1;//电机1启动标志位变量置1 motor2flag=0;//电机2启动标志位变量置0 motor1_pwm_flag=1;//电机1脉冲宽度调制标志位变量置1 motor2_pwm_flag=0;//电机1脉冲宽度调制标志位变量置0 zhengzhuanled=1;//关正转指示灯 fanzhuanled=1;//关反转指示灯 IN3=0;//L298M芯片控制端IN3置低电平,电机不运转。 IN4=0;//L298M芯片控制端IN4置低电平,电机不运转。 while(!xuanze);//选择键释放 } } if(xuanzenum==2)//判断选择次数变量是否为2 { // TR0=0; // Time0num=0;//定时器0定时计数变量清0 // pwm=0;//脉冲宽度调制变量清0 xuanzenum=0;//选择次数变量清0 motor1flag=0;//电机1启动标志位变量置1 motor2flag=1;//电机2启动标志位变量置0 motor1_pwm_flag=0;//电机1脉冲宽度调制标志位变量置0 motor2_pwm_flag=1;//电机1脉冲宽度调制标志位变量置1 xuanzeled=1;//关选择指示灯 zhengzhuanflag=0;//正转标志位变量为0 fanzhuanflag=0;//反转标志位变量为0 zhengzhuanled=1;//关正转指示灯 fanzhuanled=1;//关反转指示灯 IN1=0;//L298M芯片控制端IN1置低电平,电机不运转。 IN2=0;//L298M芯片控制端IN2置低电平,电机不运转。 } if(motor1flag==1&&motor2flag==0&&motor1_pwm_flag==1)//判断电机1启动标志位变量是否置1,电机2启动标志位变量是否置0 ,电机1脉冲宽度调制标志位变量置1,此处为电机1正反转。 { if(zhengzhuan==0)//判断是否按下正转键 { // shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时 delay(5); if(zhengzhuan==0)//再次判断是否按下正转 { // shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时 zhengzhuanled=0;//开正转指示灯 fanzhuanled=1;//关反转指示灯 zhengzhuanflag=1;//正转标志位变量为1 fanzhuanflag=0;//反转标志位变量为0 IN1=0;//L298N芯片控制端IN1置高电平 IN2=1;//L298N芯片控制端IN2置低电平 while(!zhengzhuan);//正转键释放 } } if(fanzhuan==0)//判断是否按下反转键 { // shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时 delay(5); if(fanzhuan==0)//再次判断是否按下反转键 { // shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时 zhengzhuanled=1;//关正转指示灯 fanzhuanled=0;//开反转指示灯 zhengzhuanflag=0;//正转标志位变量为0 fanzhuanflag=1;//反转标志位变量为1 IN1=1;//L298N芯片控制端IN1置低电平 IN2=0;//L298N芯片控制端IN2置高电平 while(!fanzhuan);//反转键释放 } } } if(motor1flag==0&&motor2flag==1&&motor2_pwm_flag==1)//判断电机1启动标志位变量是否置0,电机2启动标志位变量是否置1 ,电机2脉冲宽度调制标志位变量置1,此处为电机2正反转。 { if(zhengzhuan==0)//判断是否按下正转键 { // shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时 delay(5); if(zhengzhuan==0)//再次判断是否按下正转 { // shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时 zhengzhuanled=0;//开正转指示灯 fanzhuanled=1;//关反转指示灯 zhengzhuanflag=1;//正转标志位变量为1 fanzhuanflag=0;//反转标志位变量为0 IN3=0;//L298N芯片控制端IN3置高电平 IN4=1;//L298N芯片控制端IN4置低电平 while(!zhengzhuan);//正转键释放 } } if(fanzhuan==0)//判断是否按下反转键 { // shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时 delay(5); if(fanzhuan==0)//再次判断是否按下反转键 { // shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时 zhengzhuanled=1;//关正转指示灯 fanzhuanled=0;//开反转指示灯 zhengzhuanflag=0;//正转标志位变量为0 fanzhuanflag=1;//反转标志位变量为1 IN3=1;//L298N芯片控制端IN3置低电平 IN4=0;//L298N芯片控制端IN4置高电平 while(!fanzhuan);//反转键释放 } } } if(zhengzhuanflag==1||fanzhuanflag==1)//判断电机是否为正转或反转 { if(jiasujian==0)//判断是否按下加速键 { // shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时 delay(5); if(jiasujian==0)//再次判断是否按下加速键 { // shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时 if(pwm < 20)//判断脉冲宽度调制变量是否小于20 pwm++;//脉冲宽度调制变量先赋值再加加 if(pwm >= 20)//判断脉冲宽度调制变量是否大于等于20 pwm = 19;//脉冲宽度调制变量等于20 while(!jiasujian);//加速键释放 } } if(jiansujian==0) //判断是否按下减速键 { // shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时 delay(5); if(jiansujian==0)//再次判断是否按下减键 { // shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时 if(pwm > 0)//判断脉冲宽度调制变量是否大于0 pwm--;//脉冲宽度调制变量先赋值再减减 if(pwm <= 0)//判断脉冲宽度调制变量是否小于等于0 pwm = 0;//脉冲宽度调制变量等于0 while(!jiansujian);//减速键释放 } } } } } // void shumaguandisplay(uint qian,uint bai,uint shi,uint ge)//数码管显示函数 //{ // duan=1;//开数码管段码端口 // P0=table[qian];//数码千位显示 // duan=0;//关数码管段码端口 // P0=0x00;//关数码管段码显示 // wei=1;//开数码管位码端口 // P2=weima[0];//第1位数码管显示 // wei=0;//关数码管位码端口 // delay(1);//延时 // // duan=1;//开数码管段码端口 // P0=table[bai];//数码百位显示 // duan=0;//关数码管段码端口 // P0=0x00;//关数码管段码显示 // wei=1;//开数码管位码端口 // P2=weima[1];//第2位数码管显示 // wei=0;//关数码管位码端口 // delay(1);//延时 // // duan=1;//开数码管段码端口 // P0=table[shi];//数码管十位显示 // duan=0;//关数码管段码端口 // P0=0x00;//关数码管段码显示 // wei=1;//开数码管位码端口 // P2=weima[2];//第3位数码管显示 // wei=0;//关数码管位码端口 // delay(1);//延时 // // duan=1;//开数码管段码端口 // P0=table[ge];//数码管个位显示 // duan=0;//关数码管段码端口 // P0=0x00;//关数码管段码显示 // wei=1;//开数码管位码端口 // P2=weima[3];//第4位数码管显示 // wei=0;//关数码管位码端口 // delay(1);//延时 // } // void shumaguannodisplay(uint qian,uint bai,uint shi,uint ge)//数码管显示函数 //{ // duan=1;//开数码管段码端口 // P0=table[qian];//数码千位显示 // duan=1;//关数码管段码端口 // P0=0x00;//关数码管段码显示 // wei=1;//开数码管位码端口 // P2=weima[0];//第1位数码管显示 // wei=1;//关数码管位码端口 // delay(1);//延时 // // duan=1;//开数码管段码端口 // P0=table[bai];//数码百位显示 // duan=1;//关数码管段码端口 // P0=0x00;//关数码管段码显示 // wei=1;//开数码管位码端口 // P2=weima[1];//第2位数码管显示 // wei=1;//关数码管位码端口 // delay(1);//延时 // // duan=1;//开数码管段码端口 // P0=table[shi];//数码管十位显示 // duan=1;//关数码管段码端口 // P0=0x00;//关数码管段码显示 // wei=1;//开数码管位码端口 // P2=weima[2];//第3位数码管显示 // wei=1;//关数码管位码端口 // delay(1);//延时 // // duan=1;//开数码管段码端口 // P0=table[ge];//数码管个位显示 // duan=1;//关数码管段码端口 // P0=0x00;//关数码管段码显示 // wei=1;//开数码管位码端口 // P2=weima[3];//第4位数码管显示 // wei=1;//关数码管位码端口 // delay(1);//延时 // } void main()//主函数 { TimerInit();//定时器初始化函数 ENA=0; ENB=0; IN1=0;//L298M芯片控制端IN1置低电平,电机不运转。 IN2=0;//L298M芯片控制端IN2置低电平,电机不运转。 IN3=0;//L298M芯片控制端IN3置低电平,电机不运转。 IN4=0;//L298M芯片控制端IN4置低电平,电机不运转。 while(1)//死循环 { KeyScan();//按键扫描函数 // if(qitingnum==1)//判断启停键是否第一次按下 // shumaguandisplay(qian,bai,shi,ge);//数码管显示函数 } }
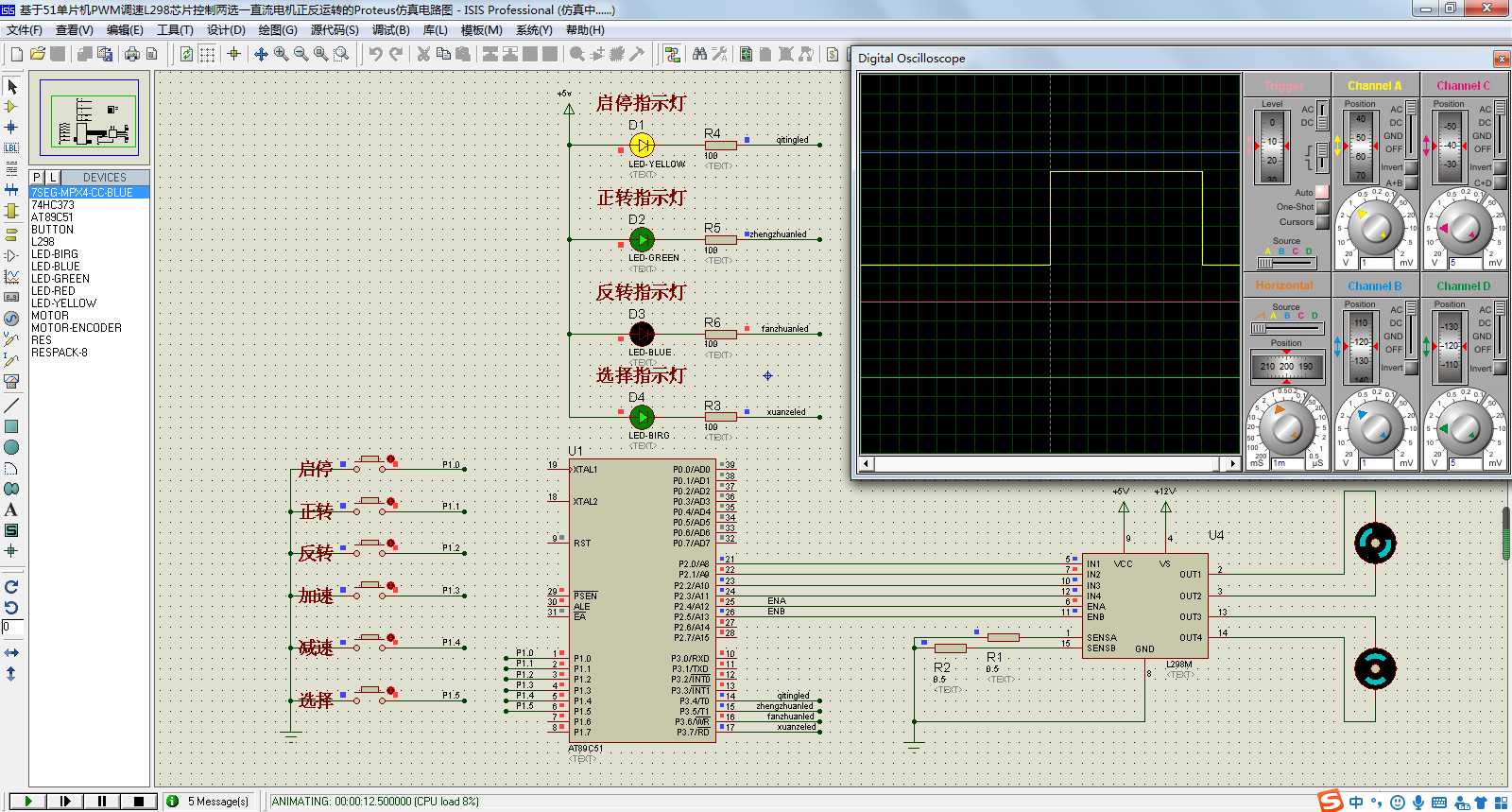
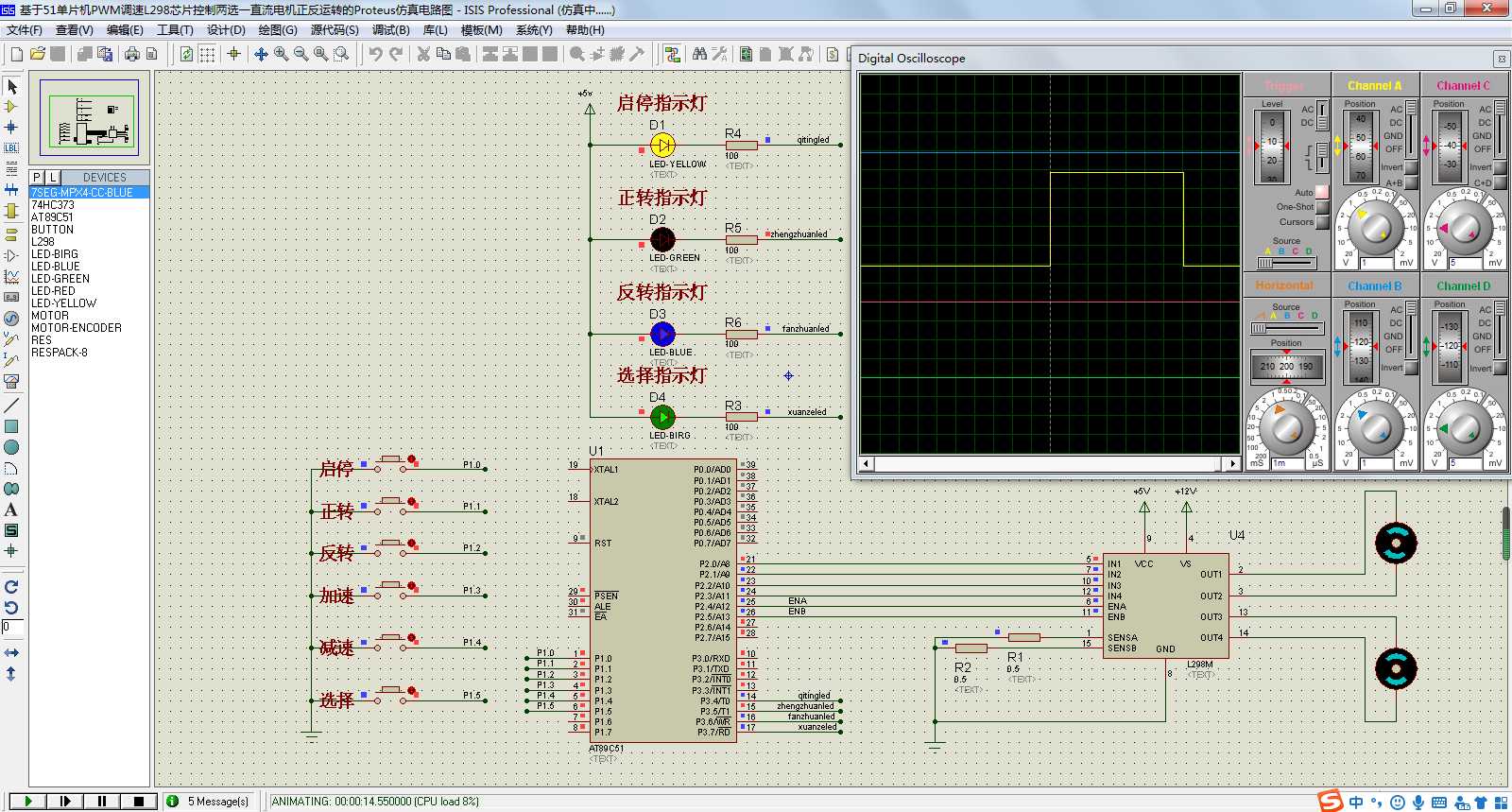
基于51单片机PWM调速L298芯片控制两选一直流电机正反运转的项目工程
标签:按键 ble splay err 大于等于 需要 == 获取 按键扫描
原文地址:https://www.cnblogs.com/AChenWeiqiangA/p/12919752.html