标签:cpio mic remote bz2 shared com 修改 入口 start
配置内核选项
?make defcon?g # Default con?guration is based on ‘x86_64_defcon?g‘
?make menucon?g
?#打开debug相关选项
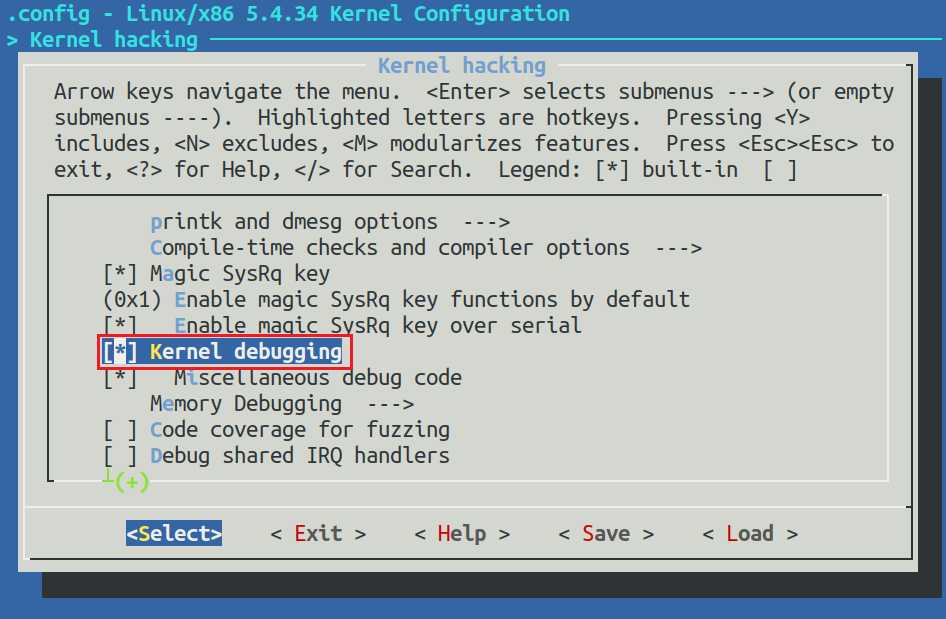
?Kernel hacking --->
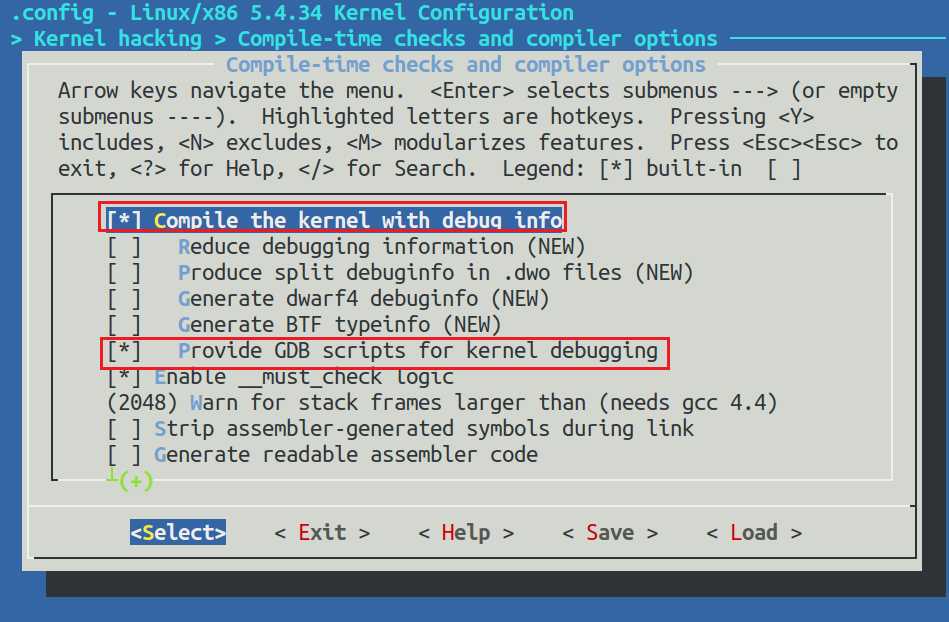
?Compile-time checks and compiler options --->
?[*] Compile the kernel with debug info
?[*] Provide GDB scripts for kernel debugging
?[*] Kernel debugging
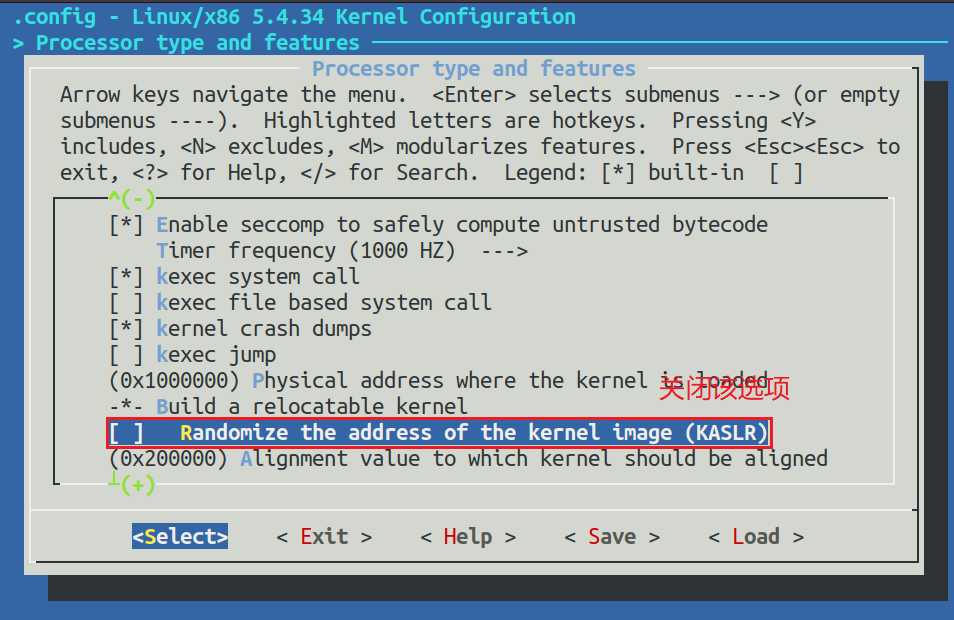
?#关闭KASLR,否则会导致打断点失败
?Processor type and features ---->
?[] Randomize the address of the kernel image (KASLR)
配置完成后, 将源码重新编译, 然后运行qemu:
qemu-system-x86_64 -kernel arch/x86/boot/bzImage
制作根文件系统
下载busybox源码
axel -n 20 https://busybox.net/downloads/busybox-1.31.1.tar.bz2
tar -jxvf busybox-1.31.1.tar.bz2
cd busybox-1.31.1
配置
配置编译成静态链接库
?Settings --->
?[*] Build static binary (no shared libs)
?然后编译安装,默认会安装到源码?录下的_install?录中。
?make -j$(nproc) && make install
制作内存根文件系统
?mkdir rootfs
?cd rootfs
?cp ../busybox-1.31.1/_install/* ./ -rf
?mkdir dev proc sys home
?sudo cp -a /dev/{null,console,tty,tty1,tty2,tty3,tty4} dev/
准备测试脚本
?准备init脚本?件放在根?件系统跟?录下(rootfs/init),添加如下内容到init?件。
#!/bin/sh
mount -t proc none /proc
mount -t sysfs none /sys
echo "Wellcome MengningOS!"
echo "--------------------"
cd home
/bin/sh
?给init脚本添加可执?权限
chmod +x init
打包根文件系统 , 测试
?nd . -print0 | cpio --null -ov --format=newc | gzip -9 > ../rootfs.cpio.gz
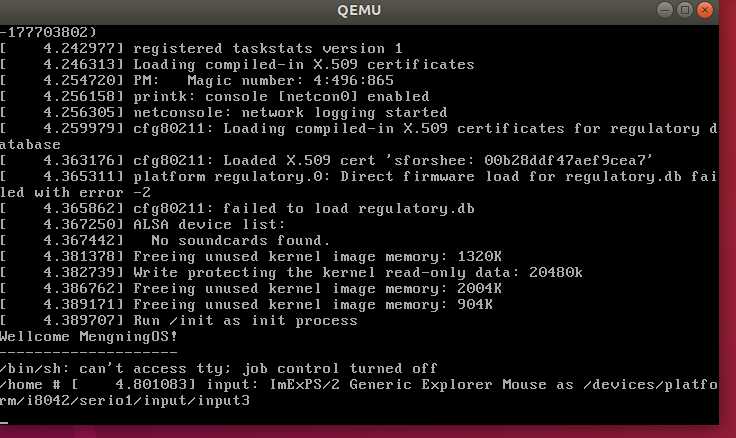
测试挂载根?件系统,看内核启动完成后是否执?init脚本
qemu-system-x86_64 -kernel linux-5.4.34/arch/x86/boot/bzImage-initrd rootfs.cpio.gz
可以看到我们的脚本 已经顺利的被打包到根文件系统中运行了
调试75号系统调用
我的学号后两位是75, 查看系统调用表
arch/x86/syscalls/syscall_64.tbl
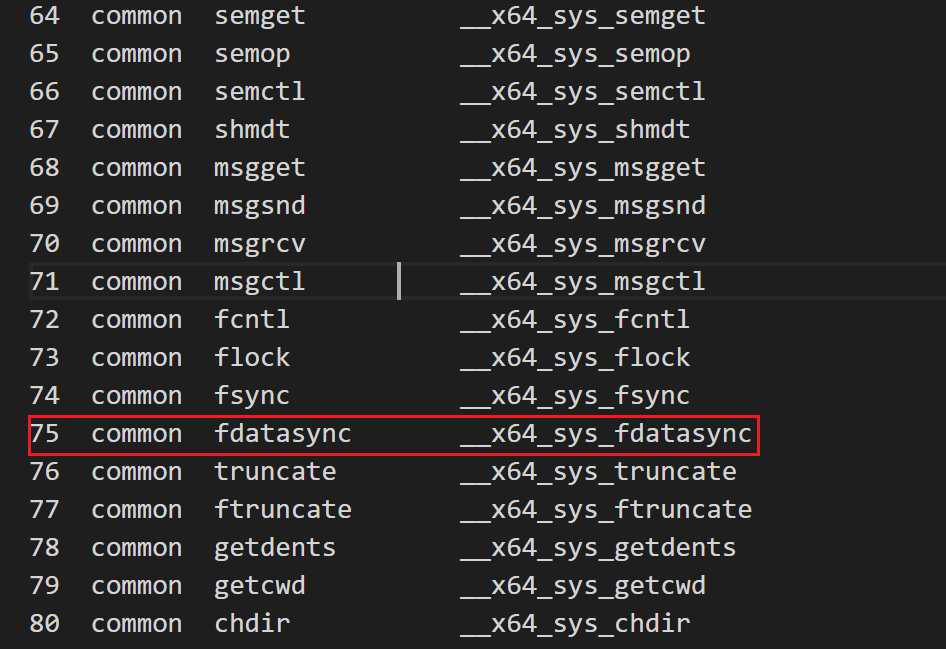
该系统调用的功能 是将数据刷新到磁盘上面
fdatasync:
Linux的文件存储的是将
数据和文件信息inode分别存储的,在inode中保存了如:名称、文件大小size、修改时间、访问时间等信息我们称作metadata元数据。数据和文件信息inode在物理上是分开存储的,innode修改时需要一次磁盘IO的。
编写一个简单的代码来触发fdatasync系统调用
int main()
{
asm volatile(
"movl $0x4B,%eax\n\t" //使用EAX传递系统调号75
"syscall\n\t" //触发系统调用;
);
return 0;
}
编译这个代码生成可执行文件fdatasync_test(一定要加上-static参数使用静态编译, 因为我们设置了在内核中设置了静态编译选项)
重新打包根文件系统
?nd . -print0 | cpio --null -ov --format=newc | gzip -9 > ../rootfs.cpio.gz
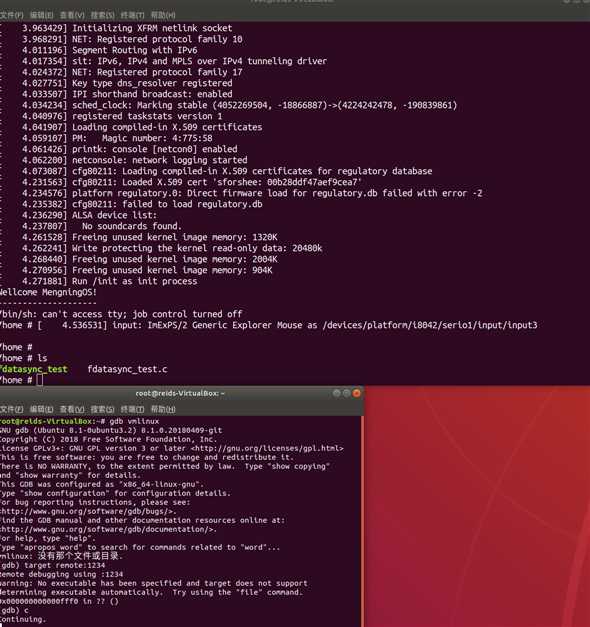
启动系统
qemu-system-x86_64 -kernel linux-5.4.34/arch/x86/boot/bzImage -initrd rootfs.cpio.gz -S -s -nographic -append "console=ttyS0"
调试
gdb vmlinux
target remote:1234
接着我们输入c, 虚拟机会继续运行, 完成初始化并进入初始界面
? 因为fdatasync对应的函数入口是_x64_sys_fadatasync, 所以我们在这个打下断点:
标签:cpio mic remote bz2 shared com 修改 入口 start
原文地址:https://www.cnblogs.com/sa19225475/p/12965056.html